

組立工程で発生する人的エラーや修正作業の削減に貢献ESTORQ(R)とES-Gripperによるコネクタの自動挿入を実現
@Press / 2020年7月15日 11時0分
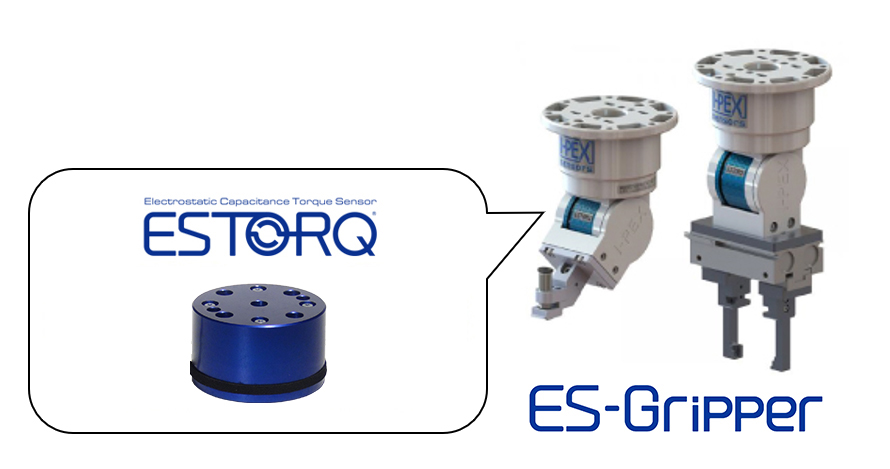
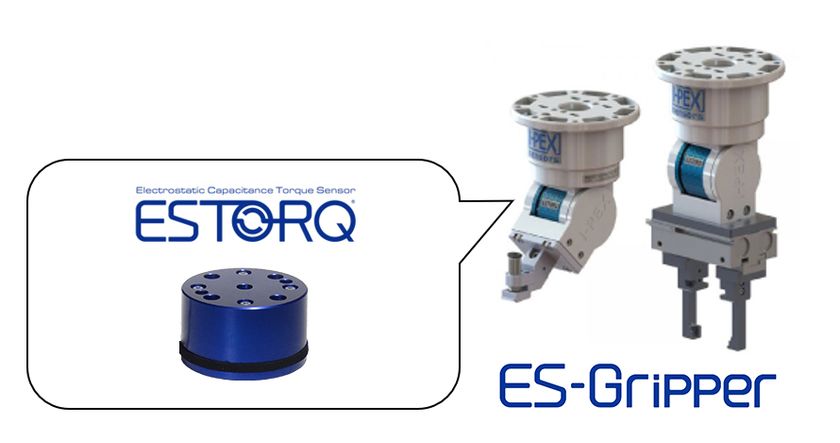
第一精工株式会社(本社:京都府京都市、代表取締役社長:土山 隆治、東証第一部 コード番号:6640、以下 第一精工)は、I-PEXブランドで販売する静電容量型トルクセンサ「ESTORQ(R)(エストルク)」を搭載した自動嵌合ロボット用エンドエフェクタ「ES-Gripper(エスグリッパー)」によって、コネクタの自動挿入を実現しました。
コネクタの自動挿入によって、工場で発生する人的エラーと修正作業の削減に貢献し、時間および費用の両方を削減します。
画像1: https://www.atpress.ne.jp/releases/218655/LL_img_218655_1.jpg
ESTORQ(R)およびES-Gripper
■静電容量型トルクセンサ「ESTORQ(R)」概要
ESTORQ(R)は、人協働ロボットや自動組立装置などの回転動作により発生するトルクを検出し、制御するためのセンサです。ESTORQ(R)を搭載することで、ロボットが外部から加わる力を検出し、異常を感知したときに自動的に停止することが可能となり、稼働中のロボットアームとの接触による怪我の恐れなく、ロボットと人間が並んで作業することが可能になります。
従来のトルクセンサと比較してシンプルな構造ではるかに小型、軽量であるため、ロボットの関節部分に簡単に配置でき、お客さまのニーズに合わせた自由な設計を可能にするだけでなく、大幅なコスト削減にも貢献します。また、ESTORQ(R)を二重回路設計とすることにより、安全性検証(ISO 10218)を取得可能です。
■自動嵌合ロボット用エンドエフェクタ「ES-Gripper」概要
ES-Gripperはロボットによるコネクタの自動嵌合用として開発した、ロボット用エンドエフェクタです。ESTORQ(R)を組み込むことにより、コネクタの正確な位置合わせの自動調整に対応するだけでなく、専用ソフトウェアを通して作業時のコネクタの挿入力を記録し、嵌合力データの追跡も可能にします。ES-Gripperのアタッチメント部分を交換することで、FPC/FFCコネクタやケーブル対基板コネクタ、基板対基板コネクタをはじめ、さまざまなタイプのコネクタシリーズに対応可能です。
さらに詳しい情報はこちらをご覧ください。
ESTORQ(R) : https://www.i-pex.com/ja-jp/library/article/last-mile-automation
ES-Gripper: https://www.i-pex.com/ja-jp/product/es-gripper
■会社概要
商号 : 第一精工株式会社
代表者 : 代表取締役社長 土山 隆治
所在地 : 〒612-8024 京都市伏見区桃山町根来12番地4
設立 : 1963年7月10日
資本金 : 109億6千8百万円(2019年12月31日現在)
事業内容: ・コネクタ及びエレクトロニクス機構部品事業
・自動車電装・関連部品事業
・半導体設備及びその他の事業
URL : http://www.daiichi-seiko.co.jp/
■I-PEX株式会社への社名変更について
2020年8月1日、第一精工株式会社は社名をI-PEX株式会社へ変更し、ブランドをI-PEXに統一いたします。
詳しくはこちらをご覧ください。
https://youtu.be/hlBARMfpLZY
詳細はこちら
プレスリリース提供元:@Press

この記事に関連するニュース
-
オリエンタルモーターの中空ロータリーアクチュエータ、UR+製品認証を取得
マイナビニュース / 2024年4月16日 6時30分
-
コアスタッフがイリソ電子工業と販売代理店契約を締結 通販サイト『CoreStaff ONLINE』でコネクタ製品の販売を強化
@Press / 2024年4月5日 10時0分
-
鹿島建設、カジマメカトロエンジニアリングと共同で風量測定ロボット「Air-vo(TM)」を開発
PR TIMES / 2024年4月4日 15時15分
-
"視触覚ハンド"PoCサービスをスタート
PR TIMES / 2024年4月4日 13時45分
-
風量測定業務を約6割削減する「Air-vo(TM)」(エアボ)を開発
PR TIMES / 2024年4月4日 13時15分
ランキング
-
1リッチモンド、顧客満足度1位に「なっちゃう」神髄 目指さずとも…要因は"委ねる"から生まれる主体性
東洋経済オンライン / 2024年4月23日 10時30分
-
2いなば食品、大炎上でも「不買運動」が起きぬ理由 キリンはあれだけ盛り上がったが…どこに違いが?
東洋経済オンライン / 2024年4月23日 18時10分
-
3「会社の飲み会」を避ける人は大損している…飲み会は無駄という若手が知らない"お値段以上のリターン"
プレジデントオンライン / 2024年4月23日 6時0分
-
4【要注意】自宅に「エコキュートの無料点検をします」と突然の来訪! 悪徳業者の「詐欺」の場合もあるの? 正規業者との見分け方や注意点を解説
ファイナンシャルフィールド / 2024年4月22日 5時0分
-
5今から家買う人は知らないとマズい「耐震」の真実 過去の大地震の被害データを分析してわかること
東洋経済オンライン / 2024年4月23日 13時0分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください






{kind=link}