

世界初! 2021年春“自動運転”市販車がいよいよ始動! 近未来の自動運転が目指す究極の姿とは
MōTA / 2021年1月2日 10時30分

ホンダ レジェンド(写真は北米仕様「アキュラ RLX」)
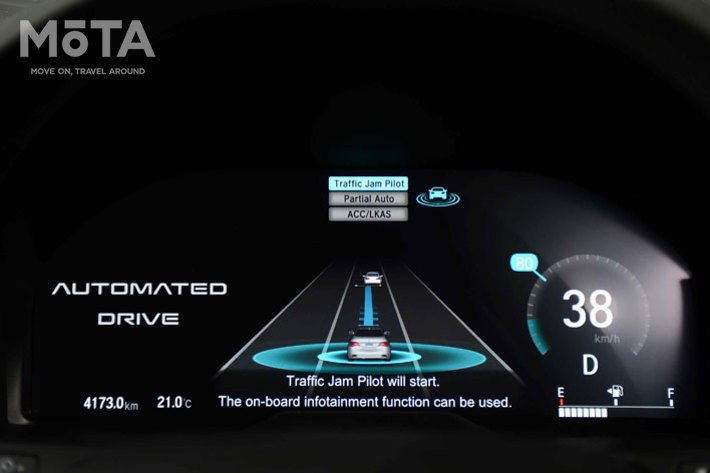
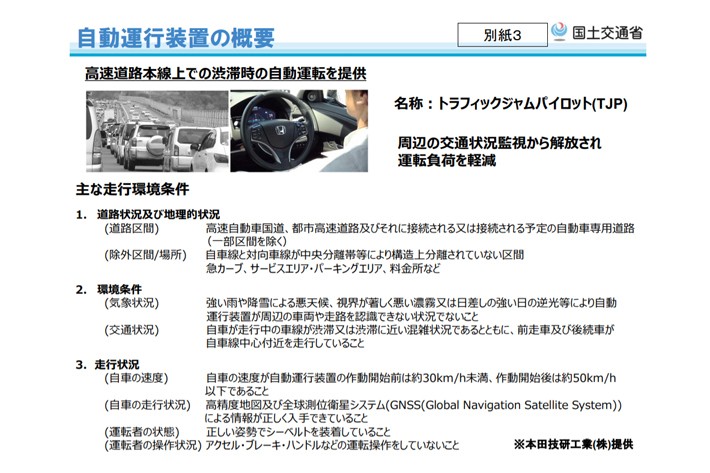
2021年春、ホンダが世界に先駆けて高度な自動運転機能「トラフィックジャムパイロット」を市販モデルで実用化する。完全自動運転の実現に向けた大きな一歩となりそうだ。自動運転元年となる2021年、この先、自動運転の世界はこの先どのように発展していくのだろうか。カーライフジャーナリスト渡辺陽一郎氏が、自動運転の目指すべき未来について解説する。
![ホンダ レジェンドを用いた高速道路での自動運転試験車両[画像は2017年「Honda Meeting 2017」での模様]](https://cdn.autoc-one.jp/images/article/202011/12063134800_787b_o.jpg)
ドライバーではなくシステムが制御する初めての“自動運転”が2021年実用化へ

国土交通省による自動運転の定義によると、自動運転レベル1とレベル2は、制御をドライバーが監視するものだ。現在の先進運転支援機能は、レベル1かレベル2に属する。
これがレベル3になると、制御をドライバーではなくシステムが監視する。ドライバーは前方を注視する必要がなくなり、例えばスマートフォンを操作していても構わないと受け取られる。
スマホ操作はOK! でもドライバーの対応が求められる時も
しかしその一方で、自動運転レベル3には「制御の作動継続が困難な場合はドライバーの対応が必要」という条件も付く。ここが問題だ。
制御の作動継続が困難な場合、つまり周囲の交通環境が複雑になった時でもドライバーが対応するには、車両の置かれた状況を予め認識しておく必要があるだろう。自動運転の作動中にスマートフォンを操作していて、作動継続が困難な場合に適切に対応できるのか、という疑問が残る。
事故時の帰責性について、ホンダでは「ドライバーの責任」としている。その意味でも従来のレベル2に近い。
日本と日本の企業が“世界に先駆けて”レベル3を実現させた背景
自動運転の実用化推進は国をあげての施策
国土交通省やホンダの話を総合すると、あくまでも想像だが「(世界に先駆けて)早くレベル3を実現させよう」というニーズがあったらしい。国土交通省では「自動運転は内閣府も力を入れる国の方針」とコメントしている。「国を挙げて取り組んでいるのに、遅々として進捗しない」不満もあったようだ。
従ってレベル3といっても、ユーザーから見た時の使い勝手やメリットは、レベル2とほとんど変わらない。
レベル3よりレベル2のクルマのほうが高機能という不思議

日産は、スカイラインに搭載する先進運転支援システム“プロパイロット2.0”で、高速巡航時の手離し運転も可能にした。しかも速度の上限は、高速道路の最高速度制限とイコールだ。渋滞時の運転支援機能に限定される現在のレベル3の速度域を上回る。
しかしプロパイロット2.0もレベル2に準拠したシステムだ。こうしてみても、自動運転レベル2とレベル3の違いは極めて曖昧である。
全ての基本は“事故が起きないこと”! 自動運転の近未来を考える
レベル2の高精度化や限定的な条件下での自動運転実証が技術を育む

当分の間は、レベル2の運転支援機能が進化していくだろう。高速道路などにおいて、手離し運転が可能な制御の普及は進むが、ドライバーが機能や周囲の状況を常に監視する必要はある。この「制御は手離し、ドライバーは監視」の期間が相当に続き、この間のデータ収集もあって制御技術が進化して、もはや大丈夫となった段階で自動運転への移行が始まる。
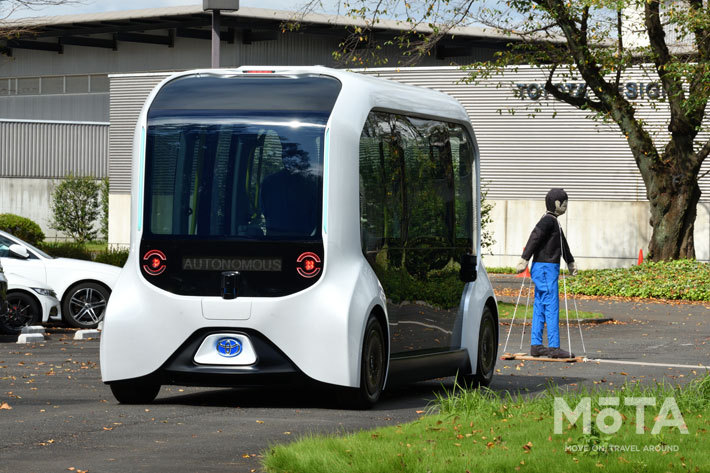
あるいは、関係者以外は立ち入らない管理された工場、複数の倉庫が設置された敷地内などの特定条件下では無人の自動運転が進む(自動運転レベル4)。これは既に実用化され始めており、ここで得られたノウハウも自動運転の基礎になる。
自動運転レベル4の実用化には極めて高次元な安全性が求められる
今は人が運転するから「過失に基づく事故は発生しても仕方ない」という認識があり、疑問を抱かずに乗っていられる。それをクルマ任せにしながら、いつ事故が発生するか分からないのでは、恐怖の対象になってしまう。そしていかに安全装備が進化しても、走るクルマの直前に人が飛び出したら、絶対に避けられない。

現在の道路環境下で実現可能な自動運転とは
現実的なのは高速道路など限定的な条件下

それでも前方で事故が発生すると道路上に人がいることが想定され、あるいは人の存在を確認された時は、あらかじめドライバーに伝えて自動運転を解除することになる。車両以外が存在する場所での自動運転を実現させるためには、避けて通れない課題がある。
市街地で自動運転を実用化するには“専用軌道”が必要!?

実用的な速度域で走らせるためには、歩行者の立ち入りを禁止した独立軌道が必要だ。街の隅々まで、引込線のような独立軌道が敷かれ、車道と歩道はガードによって完全分離する。歩行者と車両が交わるのは、ホームドアのような扉が設置された車寄せだけだ。そして仮に独立軌道内に人が入って交通事故が生じた時は、鉄道と同じく、入った側に責任があるという認識を法的にも確立させる。
夢物語みたいだが、そこまで交通環境を変えないと、市街地まで含めた自動運転の完全な普及は難しい。
“不公平かつ未完成なツール”からの脱却こそが自動運転の目指す道だ
自動車が至るべき究極の形
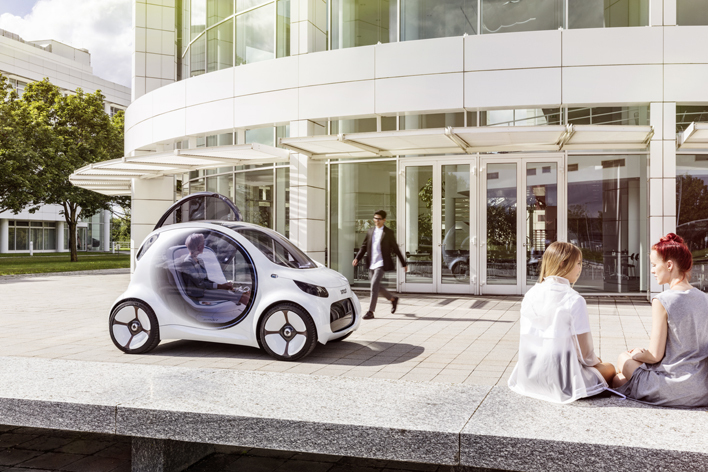
高齢になり、自宅に通じる坂道を登るのが辛くなった時、「そろそろ運転免許を返納しませんか?」といわれる。こんな不条理はない。また目が不自由だったり、知的障害がある人も、クルマを1人で自由に使うことができない。つまり現時点のクルマは、運転免許がなければ扱えない不公平かつ未完成なツールだ。
それを解決するのが自動運転だから、着実に進化させる必要がある。健全な技術の向上を妨げる思惑は、可能な限り排除せねばならない。
[筆者:渡辺 陽一郎]
外部リンク

この記事に関連するニュース
-
高速道出口にある「青いスラッシュ」何の意味? 実は重要なコト! 覚えておくべき「補助標識」の役割とは
くるまのニュース / 2024年4月18日 9時10分
-
そろそろ「春の全国交通安全運動」!バイクが特に注意すべきポイントは?
バイクのニュース / 2024年4月4日 9時10分
-
大型トラックの最高速度「時速90km」へ、引き上げの根拠と「物流2024年問題」【岩貞るみこの人道車医】
レスポンス / 2024年4月2日 12時0分
-
「トラックの最高時速90km化」は天下の愚策…職業ドライバーが「現場の首を絞めるだけ」と怒るワケ
プレジデントオンライン / 2024年4月1日 14時15分
-
ホンダ新型「アコード」万人に受けるセダンだった 乗ってわかったシーンを問わない万能さに驚く
東洋経済オンライン / 2024年3月27日 13時0分
ランキング
-
1東海道新幹線の「個室」が100系以来、四半世紀ぶりに復活! 「どこに設けられる?」JR東海に聞いた
オールアバウト / 2024年4月19日 21時45分
-
2少人数学級・特別支援学級・産育休…少子化でも教員が足りなくなる3つの理由
産経ニュース / 2024年4月19日 19時41分
-
3洗濯機が臭いです。掃除は毎月やらないとだめですか? 【家電のプロが回答】
オールアバウト / 2024年4月19日 20時15分
-
4SNSでも「かわいい」「癒し」と話題に! セリアで急増中の「シマエナガ」グッズ15選【一挙紹介】
オールアバウト / 2024年4月18日 20時45分
-
5家族が認知症?"円満に"検査を促す「誘い方」 「病院になんて行きたくない」と言われたら?
東洋経済オンライン / 2024年4月19日 17時0分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください





