

災害ロボットの開発・評価に必要な『標準でこぼこ』……つくるべき産業と技術革新の基盤
ニッポン放送 NEWS ONLINE / 2021年4月1日 17時10分

ニッポン放送「辛坊治郎 ズーム そこまで言うか!」(3月4日放送)に、長岡技術科学大学准教授・木村哲也氏が電話出演。ニッポン放送ではフジテレビ、BSフジと共に国際社会共通の目標である持続可能な開発目標(SDGs)について考えるプロジェクト「楽しくアクション!SDGs」を発足し、この地球で暮らし続ける為に見直すべきことは何なのかを考えており、今回は目標のひとつである「産業と技術革新の基盤をつくろう」の観点で災害ロボットの取り組みにフォーカスした。
飯田浩司アナウンサー)SDGsという言葉がいま注目されています。
辛坊)はい、虹色のドーナッツ型のバッジをされている方も増えましたよね。あれはSDGsのシンボルマークのバッジですよね?
飯田)そうです。17の目標がそれぞれ色分けてあってということです。17の目標がありますけれども、その9番目に『産業と技術革新の基盤をつくろう』というものがあります。ここに注目しまして、災害ロボットを開発してらっしゃいます新潟県にある長岡技術科学大学准教授の木村哲也さんにお話を伺いたいと思います。
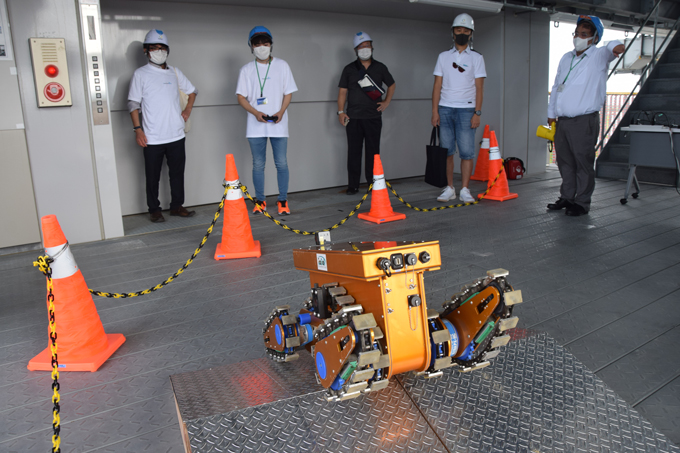
「福島ロボットテストフィールド」で研究開発中の災害対応ロボット=2020年8月 写真提供:時事通信社 ※ロボットは別事業者のもの
世界最先端の災害ロボット
辛坊)先生はなにをしてらっしゃるんですか。
木村)私は災害ロボットの研究をしていて、それが世の中で使ってもらえるような社会制度構築も研究対象にしているんです。
辛坊)ちなみに先生が開発しているロボットはどのようなロボットなのでしょうか。
木村)小さな建築機材のようなキャタピラで動いて、それに手のようなハンドがついて瓦礫をどけたり瓦礫の下に困っている人がいないかアームカメラでのぞき込んだりということができるロボットの開発を目指しています。
辛坊)いまはどのくらいまで完成しているのですか。
木村)いま我々のロボットは、レスキュー災害対応をテーマにしたロボット競技会ではかなりいい成績を取るようになりました。実用化にはまだ防水性や信頼性などを考えなければいけないですが、実用化はかなり見えるようになってきたレベルだと思っています。
辛坊)そうなると、世界最先端とご紹介していいでしょうか。
木村)そうですね……国際的な大会でいい成績を取っていますのでそこそこはいけているかなと思っています。
辛坊)縦横高さはどれくらいの大きさのものなのですか?
木村)重さ40キロ、1番大きくなると長さ1メートルくらいですね。
辛坊)それをラジコンのようなもので動かすのですか、それとも自立するんですか?
木村)まだうちのロボットは自立しないです。基本的にはラジコンだと思ってください。
辛坊)どれくらい遠くから操れるんですか?
木村)うちのやつはいま市販のWi-Fiなんでせいぜい200メートルくらいです。
辛坊)200メートル位離れたところから人が立ち入れないようなところに行ってキャタピラで動きながら生存者がいるか探すということですね。
木村)そうですね。そこの精度を上げるためにはどうしたらいいかというのをこのロボットを使っていろいろ研究しています。
辛坊)何が難しいですか?
木村)これが瓦礫とか、現場でバルブを回して止めてこいと言われてもどんなバルブかどうかが現場に行かないと分からないんです。掴む対象が分からないんです。人間ほど柔軟に対応できないので、行ってみないと分からないというのがロボットは1番困るんです。どうやって掴むのか動かすのか、我々はマニピュレーションと呼んでいますが、そこが1番難しいですね。
辛坊)そうして考えたら人間の能力はすごいですよね。危険ということをのぞいたらどこかにガスのバルブがあったとして、人間がそこに近づきバスのバルブであることに気づきそれを回せばいいというのをロボットにやらせるのは簡単ではないということですね。
木村)実はとてつもなく難しいです。産業ロボットだったら人間の10倍くらいのスピードで物を組み立てたりしますが、あれは事前に対象が決まっているため正規のプログラミングを事前に組めるんです。災害対応の場面ではガスのバルブがどこにあるかわからなく場合によってはガスが漏れてよく見えなかったり、泥まみれでバルブが滑ったり、逆にさび付いて固くなっているとか、柔軟に対応する能力がロボットにはまだなく、ロボットを作れば作るほど人間のすごさが見えてきています。

性能評価に必要な“標準でこぼこ”
辛坊)災害ロボットそのものの研究のみならず、先ほど社会制度構築とおっしゃっていましたが、それはどう実装していくかみたいな話を詰めているわけですか?
木村)災害対応ロボットは現場で使おうとすると、そのロボットはほんとうに性能がいいのかというのを見極めなければならないんです。実際に災害現場にロボットを持って行って、試させてくださいなんてわけにはいかないですから。ただ研究者の立場からするとお手軽に性能を図りたいんです。そうすると災害対応ロボットなので瓦礫を乗り越えなければいけないということで、いま我々がやっているのがでこぼこの標準不整地を作りましょうということです。辛坊さんは瓦礫というとどんな形を想像します?
辛坊)瓦礫って言われると形はさまざまとしか言えないですよね…
木村)ですよね。だからこれまで研究者がいろいろなものをかき集めて積み上げ、これで動いた動かないなどの議論をしていましたが、それだとほんとうにその技術がいいのか分からないですよね。これはもともとアメリカの研究者が、“標準瓦礫”“標準でこぼこ”を作ろうよ、とアメリカの国家プロジェクトとしてスタートして、私はそれの共同研究をしています。
辛坊)前に福島でロボットテストフィールドというところの取材をした際に、まさに言われたのが、機械があっても「お試しで」とかできないからこの場所が必要なんですと力説されたんです。その前段階で、1個1個の“ものさし”みたいなものをみんなが揃って使っていないと性能評価がそもそもできないということですね。
木村)そうです。我々が取り組んでいる“標準でこぼこ”っていうのはある意味裾の技術を伸ばす役割をします。私もロボットテストフィールドによく行きますが、あそこにはリアルな化学プラントやトンネルがあって、すごい災害現場に即した評価ができます。これはある意味最終試験のようなもので、ロボットの性能を高めていく。この2つの評価が災害ロボットにおいては重要で、それをどのように評価したらいいのかというのが私のいまの研究テーマになっています。
辛坊)先生が開発に成功したロボットを使わなければいけない局面が来ないことがほんとうはいいんですけどね。いつごろ実用化しそうですか?
木村)見に行くっていうのは、ドローンなどが既に現場で使われていますから、あとは瓦礫の上を移動しながらたくさんセンサーを持って行ったりというのは福島原発の廃炉作業の一部ではすでに使われています。なので「見る」ぐらいまではほぼ実用レベルまで達していると思います。
辛坊)あとはハンドの部分とかそういうところになっていくんですね。
木村)そうですね。瓦礫をつかむなどの繊細な作業をするというのは課題が多いです。
外部リンク

この記事に関連するニュース
-
日本発の無人航空機の衝突回避に関する技術報告書がISOより公開
PR TIMES / 2024年4月22日 12時15分
-
未来の沖野を探せ!開発者オーディション【リアルブルバスター開発プロジェクトで日本のものづくりを守る】
PR TIMES / 2024年4月10日 16時15分
-
「小さな水素社会の実現に向けて」OKUMA DRONE、水素燃料ドローン開発で新たな未来を創造
PR TIMES / 2024年4月2日 16時40分
-
経産省などが推進する惣菜盛り付け全工程の自動化事業、現場実装に成功
マイナビニュース / 2024年3月29日 19時2分
-
IEEEメンバーが提言 アフェクティブ コンピューティングの専門家 はこだて未来大学システム情報科学部 角 薫 教授
@Press / 2024年3月28日 14時30分
ランキング
-
1はあちゅう、しまむらに続きニッセンとも「コラボ中止」 開始3時間前に急きょ...本人訴え「未報道の問題抱えてない」
J-CASTニュース / 2024年4月25日 13時26分
-
2首相側近「政権交代も」 自民の党勢低迷に危機感
共同通信 / 2024年4月25日 12時28分
-
3〈那須・焼かれた2遺体〉「いつかこうなると思った」もうひとつの遺体は日頃からトラブル相手を罵っていた妻だった…逮捕された刺青男は「アニキ」と「共犯」について供述を開始
集英社オンライン / 2024年4月24日 20時58分
-
4宝島さんと都内空き家で接触か=逮捕の男の知人、事件当日―女性は妻と確認・那須2遺体
時事通信 / 2024年4月24日 21時38分
-
5「家に郵便物が届かない」日本郵便に“ウソの転居届”、親族宛ての郵便物を自宅に…1年余りで逮捕、43歳の無職の男「ノーコメントで」
北海道放送 / 2024年4月25日 9時15分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください





