

渋滞中のストレスを軽減 ボッシュの自動運転への取り組み
PR TIMES / 2013年1月23日 9時33分
・支援システムが渋滞時に自律的に車両を誘導
・必要となるコンポーネントとセンサーをすべてボッシュが提供
・完全な自動運転に向けた初期のステップ
高性能な各種の支援システムが登場し、ドライバーはより安全・快適に目的地に到着できるようになりました。例え
ば、走行速度や車間距離を制御するシステムや、ドライバーに渋滞を知らせるシステム、とても狭い駐車スペースに簡単に入庫操作ができるシステムなどが、ドライバーをサポートしています。ボッシュは今後数年の間に、自動車技術とサービスのグローバルサプライヤーとして、ドライバー・アシスタンス・システムの範囲をさらに広げていこうとしています。将来的には、渋滞に巻き込まれた車両を誘導する場合に、こういったシステムがますます重要な役割を果たすことになるでしょう。具体的には、ブレーキ、加速、ステアリング操作が完全に自動で行われるようになります。例えば、渋滞アシスタントは速度0~50 km/hで走行する場合に作動しますので、ほとんどの渋滞の状況で作動することになります。ドイツ自動車連盟(ADAC)によると、2011年に発生した渋滞の長さは、ドイツだけでも延べ40万5,000kmに達したといいます。「渋滞アシスタントがあれば、激しい渋滞に巻き込まれても、ドライバーはよりリラックスした状態で目的地に到着できるようになります」と、ボッシュ・シャシーシステム・コントロール事業部長のGerhand Steiger(ゲルハルト・シュタイガー)は述べています。第1世代の渋滞アシスタントは2014年に量産を開始する見込みで、この機能はその後、より高速でより複雑な走行状況にも対応できるように進化する予定です。最終的に渋滞アシスタントは「ハイウェイ・パイロット」としての役割を果たし、完全自動運転を実現できるようになります。
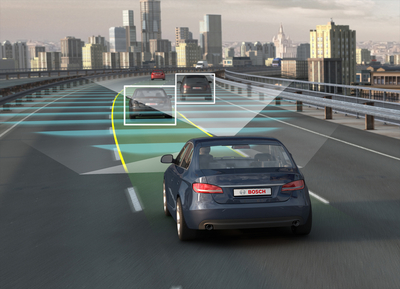
現在のアダプティブ・クルーズ・コントロールは、前走車をモニターし、その情報に応じて自車の速度と車間距離を調節しています。この機能は、横滑り防止装置ESC(エレクトロニック・スタビリティ・コントロール)や追加の支援システム(車線検知カメラや電動パワーステアリング)と連動して作動し、自律走行に向けた技術的なベースとなっています。それに寄与しているのが高性能なソフトウェアで、より安全でストレスの少ない運転ができるよう、適切な走行指示を算出します。さらに次の機能段階としては、車線の自動変更があげられますが、これを実現するためには2つの機能が必要となります。ひとつは、リアに装着したレーダーセンサーで、高速で接近してくる車両を検知する機能、もうひとつは、現在道路工事中の箇所や現地の速度制限をドライバーに通知できるような、モバイルネットワークコミュニケーションを通じて機能するダイナミックナビゲーションマップです。ドライバーが運転に責任を持つことに変わりはありませんが、こうした機能があれば、ドライバーはドライバー・アシスタンス・システムの作動を見守るだけで十分になります。
必要となるセンサーとコンポーネントをボッシュのポートフォリオですべてカバー
ボッシュは、横滑り防止装置ESCや電動ステアリングに加え、ドライバーとその車両に関連する、あらゆる交通状況の検知に必要なすべてのセンサーを提供しています。前方の検知は、各車載機能の範囲に応じて、レーダーセンサーとモノカメラとの組み合わせ、またはステレオカメラで行います。ボッシュが提供する高性能な長距離レーダーセンサーLRR3は最大30°の検知角をもち、250 m先の物体を検知することができます。また、2013年に量産が予定されている新しい中距離レーダーセンサーは、160 mの検知可能距離と45°の検知角を備えています。このセンサーは大規模市場の要求に応えられるよう設計されているため、コストが大幅に抑えられています。さらにボッシュは、ひとつのセンサーエレメントを備えた多目的ビデオカメラのほかに、2つのセンサーを使って3Dで物体を検知するステレオビデオカメラも開発しました。このカメラがあれば、物体が車両からどのくらい離れているのか、またどの方向に動いているのかを正確に計算できるようになり、どちらのセンサー構成でも、完全な衝突予知緊急ブレーキが可能となっています。また、車両後方の交通状況を監視する役割を担う2つの中距離 レーダーセンサーは、検知角が150°で、最大100 m離れた物体を検知することができ、パーキング・アシスタントの超音波センサーは近距離を検知し、ステアリング操作をサポートします。
進化し続ける自動化レベル
「完全自動運転は、一歩ずつ着実に実現していきます」と、シュタイガーは話します。最初は高速道路を走行する場合の自動化レベルが進み、そこからさらに高速でも自動で走行できるようになり、「ハイウェイ・パイロット」がすべての運転を担っていくことになるでしょう。ただ、乗り越えなくてはならない大きな課題が2つあります。その1つが、市街地走行です。数多くの道路利用者がさまざまな方向に走る混雑した交通状況に対応できるよう、車両の自動化機能が必要になってくるからです。2つ目の課題は、あらゆるタイプの走行状況で、システムの機能が確実に作動できるようにするコンセプトの開発です。今後はこうした課題に取り組んでいく必要があるでしょう。
企業プレスリリース詳細へ
PRTIMESトップへ

この記事に関連するニュース
-
「まえぇぇ!」 まさに「高速道路ミサイル」!? 工事帯に突っ込む“衝撃映像”公開! 原因はスマホと“最新便利装備”?
くるまのニュース / 2024年4月11日 9時10分
-
レクサス“新”「小さな高級車」発表! 斬新「2トーン」に大型ディスプレイ新設定! 加速性能アップの「新型UX」独で登場
くるまのニュース / 2024年4月10日 6時40分
-
中国DJI系、「14万円」の先進運転支援システム投入 エントリークラスのEVにまで搭載拡大を狙う
東洋経済オンライン / 2024年4月3日 18時0分
-
日産、インフィニティの新型「QX80」を発表! 並外れた体験ができるSUV?
マイナビニュース / 2024年3月28日 13時11分
-
ホンダ新型「アコード」万人に受けるセダンだった 乗ってわかったシーンを問わない万能さに驚く
東洋経済オンライン / 2024年3月27日 13時0分
ランキング
-
1サイゼリヤ、ギリギリ「国内黒字化」も残る難題 国内事業の利益率0.05%、値上げなしで大丈夫か
東洋経済オンライン / 2024年4月24日 7時30分
-
2山手線沿線の再開発が進む 「新宿、渋谷、品川」駅の工事はいつ終わるのか
ITmedia ビジネスオンライン / 2024年4月25日 7時10分
-
3イトーヨーカドー、祖業のアパレル復活なるか アダストリアとの新ブランドが生んだ“相乗効果”
ITmedia ビジネスオンライン / 2024年4月25日 10時0分
-
4アキレス、シューズの国内生産終了へ コスト増や少子化など背景
ロイター / 2024年4月25日 16時27分
-
5過度の変動望ましくない、動向注視し万全の対応行う=円安で官房長官
ロイター / 2024年4月25日 11時35分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください





