

世界初:ボッシュがレーダー情報を使用した自動運転用マップを開発
PR TIMES / 2017年6月23日 15時36分
オランダのマップ・交通情報プロバイダーのTomTom社と協力
● 「Radar Road Signature」(レーダー ロード シグニチャー)のためにデータを提供する最初の車が、2020年までに欧州と米国で完成予定
● ボッシュ取締役会メンバーのホーアイゼル:「Radar Road Signature」により、自動運転車両がいつでも確実に自車の位置を特定可能に
● ボッシュの「Radar Road Signature」は従来型のあらゆる地図フォーマットに対応可能
シュトゥットガルト(ドイツ) – グローバル規模で革新的なテクノロジーとサービスを提供するボッシュと、オランダのマップ・交通情報プロバイダーのTomTom社は、自動運転用高解像マップの開発において大きく一歩前進しました。ボッシュが世界に先駆け、レーダー情報を使用した、自動運転用マップに欠かせないローカリゼーションレイヤー(複数のレイヤーで構成された、高度な自動運転のためのマップ素材)の開発に成功したのです。これまで、この用途のためにはカメラデータが用いられてきましたが、 ボッシュの「Radar Road Signature」は、数十億に及ぶリフレクション(反射)ポイントで構成されています。このシステムの場合、レーダー信号がガードレールや道路標識などあらゆるところに当たると、道筋に沿ってそれらの対象物を再現します。この技術を利用したマップでは、自動運転車両は、車線内での位置を数cm単位の精度で正確に把握できるようになります。ボッシュ取締役会メンバーのディルク・ホーアイゼルは、「この「Radar Road Signature」は、自動運転に向けた重要なマイルストーンとなるでしょう。このシステムがあれば、自動運転車両はいつでも自車の位置を確実に特定できるようになるからです」と述べています。ボッシュの「Radar Road Signature」の大きな特長は、その高い安定性にあります。カメラデータのみをベースにして自車の位置を特定するマップとは異なり、この「Radar Road Signature」は、夜間や見通しが悪い場所でもしっかり機能します。さらに、このシステムは1km毎にわずか5kB(キロバイト)のデータをクラウドに送るのですが、このデータ量はカメラデータのみをベースにしたマップの場合の2分の1程度に抑えられ、システムへの負担も軽減されます。2020年までには「Radar Road Signature」を実現する第一弾の車両が欧州と米国で提供できるようになる見込みです。
[画像: https://prtimes.jp/i/5028/221/resize/d5028-221-171618-0.jpg ]
ボッシュとTomTomは2015年から提携関係を構築
TomTomのHarold Goddijn CEOはこう述べています。「ボッシュと協力した「Radar Road Signature」を通じて補助的な位置特定データを発表 できることを大変喜ばしく思っています。このシステムによって、今後は自動運転車両の自車位置特定が あらゆる点でより信頼性の高いものとなっていくでしょう」。2015年7月の提携以来、両社は「Radar Road Signature」とTomTom製の高精度マップへの技術の組み込みに集中して取り組んできました。ボッシュは現在、最大250mの範囲を検知できる77GHzのレーダーセンサーのグローバル マーケット リーダーとなっています(一般のカメラセンサーの最大検知範囲は150m程度)。そのボッシュが今後の課題として掲げているのは、この目的に合わせたレーダーセンサーの性能向上です。これらのセンサーは、現在自動緊急ブレーキシステムやアダプティブ クルーズ コントロール(ACC)などのドライバー アシスタンス システムが機能するよう、移動する物体を検知する役割を担っています。しかし、「Radar Road Signature」を実現するには、動かない物体も検知できなくてはならないため、既存のレーダーセンサーの性能向上が求められるのです。その向上を図った新世代のボッシュ製レーダーセンサーは今後、「Radar Road Signature」に必要なデータを提供できるようになります。これについてホーアイゼルは、「数年後に市場投入される車両は、新しい自動運転車両用マップを活用する新しいアシスタンス機能を搭載していることになるでしょう」と述べています。
高精度マップを最新の状態に保つために100万台の車両が必要
高精度マップは、搭載したセンサーの感知範囲を超えて情報を提供するため、自動運転には欠かせない存在です。現在のナビゲーションシステムに用いられているマップと異なり、この高精度マップは複数のレイヤーで構成されています。
ローカリゼーションレイヤー:自動運転車両は、ボッシュの「Radar Road Signature」と補助的なカメラローカリゼーションマップから成るローカリゼーションレイヤーを用いて、車線内での自車位置を特定することができます。自動運転車両は、サラウンドセンサー経由で入手した物体に関する情報とローカリゼーションレイヤーから得た関連情報を比較し、その物体と自車の相対的な位置を把握します。
プランニングレイヤー:プランニングレイヤーは、自動運転中の個々の操舵を計算するために用いられます(軌道プランニング)。このレイヤーには、道筋、道路標識、制限速度といった情報だけでなく、カーブや坂などに関する情報も含まれています。自動運転車両はこのプランニングレイヤーを使用して、例えば車線をいつ変更すべきかを決定できるようになります。
ダイナミックレイヤー:交通渋滞、工事現場、事故多発地域や利用可能な駐車スペースなど、頻繁に変動する交通状況に関する情報はダイナミックレイヤーに保存されます。
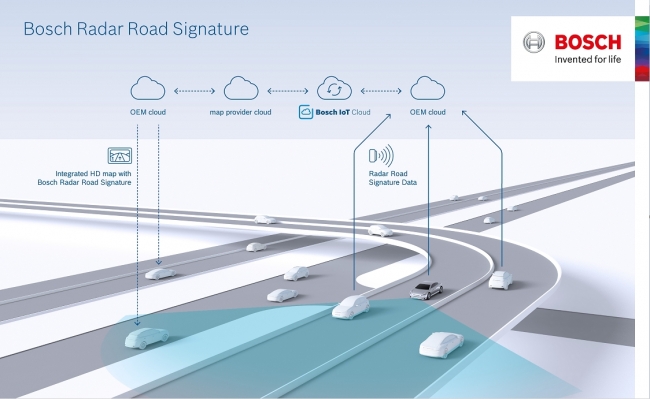
自動運転用高精度マップを構成するレイヤーはいずれも定期的な更新が必要で、ダイナミックレイヤーについてはリアルタイムで更新を行う必要があります。「私たちの高精度マップを最新の状態に保つためには、欧州、北米、アジア太平洋地域の高速道路でそれぞれ、約100万台の車両が必要になると考えています」とホーアイゼルは話します。その理由は、各レイヤーに用いられる最新のデータが運転中に車載センサーによって生成されるからです。レーダーセンサーのデータは、ボッシュのCCU(コネクティビティ コントロール ユニット)などのコミュニケーションボックス経由で車両からメーカーのクラウドに送信され、さらにBosch IoT Cloudにも送られます。ボッシュはこのデータをもとに、従来型のあらゆる地図 フォーマットに対応した「Radar Road Signature」を作り上げようとしています。そして、この「Radar Road Signature」はTomTomにより全体マップに組み込まれ、より多くのお客様に提供されていきます 。
企業プレスリリース詳細へ
PR TIMESトップへ

この記事に関連するニュース
-
BEV販売に急ブレーキ!新たな局面を迎えた中国 存在感増すスマートカーとファーウェイ系NEV
東洋経済オンライン / 2024年4月20日 7時20分
-
Micron、最大1.8TBを提供する車載グレードのクアッドポートSSDを発表
マイナビニュース / 2024年4月15日 6時49分
-
中国DJI系、「14万円」の先進運転支援システム投入 エントリークラスのEVにまで搭載拡大を狙う
東洋経済オンライン / 2024年4月3日 18時0分
-
【調査レポート】※プレミアム会員限定 自動運転領域におけるサプライヤー動向調査
レスポンス / 2024年4月1日 8時45分
-
バイク/カー用品メーカーのMAXWINからバイク用CarPlay/Android Auto対応高性能スマートモニター『M2-PRO』が登場!先行予約販売開始!
@Press / 2024年3月25日 9時0分
ランキング
-
1全国で閉店相次ぐなか百貨店が“過去最高益” 絶好調の百貨店を支える訪日外国人【Nスタ解説】
TBS NEWS DIG Powered by JNN / 2024年4月22日 20時37分
-
2新Vポイント「残高確認できず」 サービス開始初日、運営会社陳謝
共同通信 / 2024年4月22日 23時28分
-
3“グリコ”プリンなどが品切れに “システム障害” 商品の一部が出荷停止 再開までに時間
日テレNEWS NNN / 2024年4月22日 20時31分
-
4常識覆す「豪華すぎるマイクロバス」が登場!座席は「ほぼ全て窓側」特別仕様
乗りものニュース / 2024年4月23日 9時42分
-
5「会社の飲み会」を避ける人は大損している…飲み会は無駄という若手が知らない"お値段以上のリターン"
プレジデントオンライン / 2024年4月23日 6時0分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください





