

人が使うものは何が重要なのか? アバターロボットで競う「ANA AVATAR XPRIZE」決勝レースレポ
ASCII.jp / 2022年11月17日 12時0分

ユーザーの使いやすさを競う アメリカで開催される賞金レース「ANA AVATAR XPRIZE」
2022年11月4日~5日(現地時刻)、アメリカ・カリフォルニア州にあるロングビーチ・アリーナにて、XPRIZE財団が運営し、アバターロボットの開発を競う賞金レース「ANA AVATAR XPRIZE」の決勝戦が開催されました。


「ANA AVATAR XPRIZE」は2016年スタートしたXPRIZE財団が運営する賞金レース。XPRIZEはスポーンサーによる様々なコンペティションを開催しています。たとえば、現在進行中の大気中や海中などから二酸化炭素を回収する技術を競うコンテスト「XPRIZE Carbon Removal」や、 2019年に決勝が行なわれた自律型の海中ロボットを使った深海の精密な地図を作成するコンテスト「Shell Ocean Discovery XPRIZE」には、東京大学やKDDIなどが共同で「Team KUROSHIO」として参加し準優勝しています。

「ANA AVATAR XPRIZE」では、ANAが賞金レースのテーマとして「AVATARを使い地理的・時間的・経済的距離を縮めて世界をつなぎ人類の様々な課題を解決」を提案し、XPRIZE財団に採用されています。
2018年に賞金レースとして正式に発表。世界中から99チームが参加を表明し、2021年4月には38チームがセミファイナルに進出。2022年5月に行なわれたファイナル(決勝戦)を公開イベントにするとともに、20チームのファイナル進出チーム(最終的に決勝を戦ったのは17チーム)が発表されました。

ちなみにXPRIZEのコンペティションが、今回のように公開イベントとして開催されるのは初めてとのこと。ひと月ほど前に各チームに決勝内容が通達され、各チーム本番に向けてハードウェア・ソフトウェアとも調整を続けてこのイベントに挑んでいます。

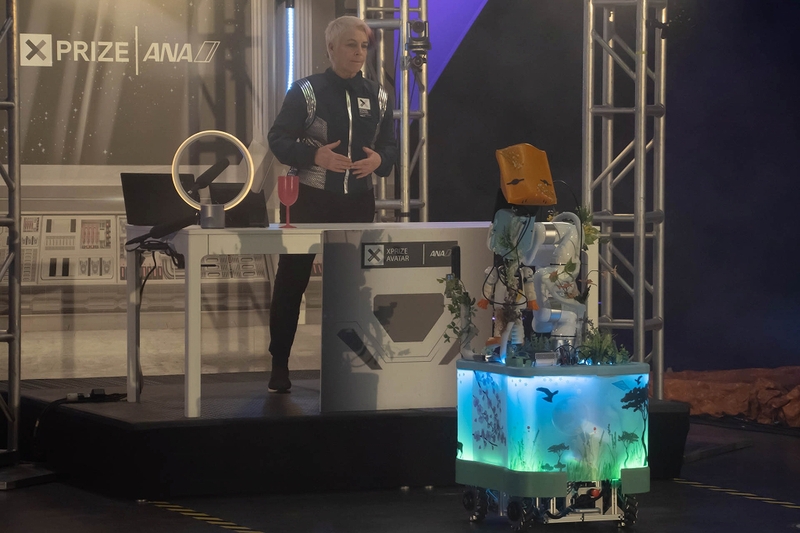
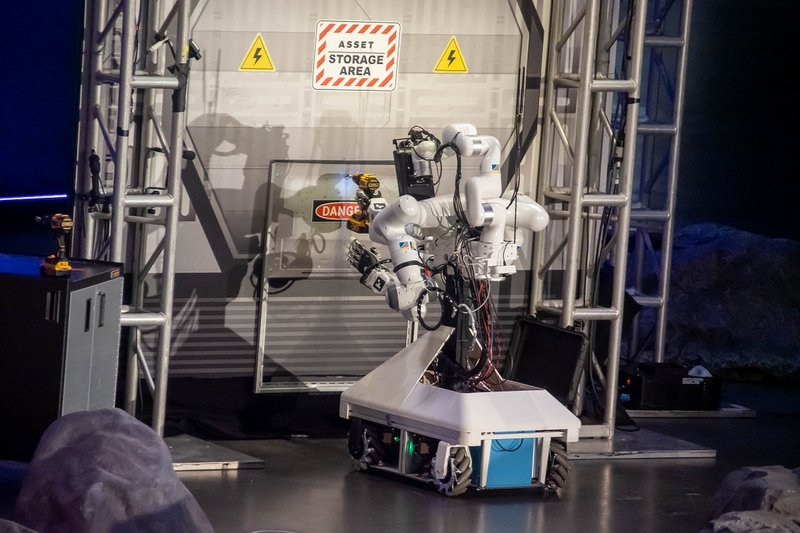
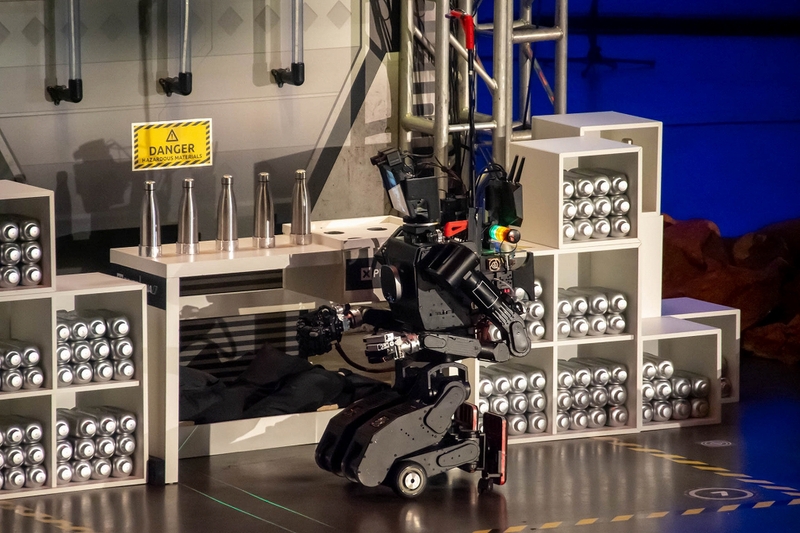
決勝の内容は、宇宙空間を想定し、ロボットを遠隔操作してミッションをクリアしていくというもの。ミッションはテーマがアバターということもあり、最初に今回のミッションを有人カウンターの係員から聞いて復唱するところからスタート。そこから、ゲートを開けるためのレバーを上げる→ゲートを通って一定の距離を安定して走行する→ボトル状のバッテリーを持ち上げて、決められた穴にはめる→岩を避けながら移動→ドリルを持って壁のナットを回し扉を開ける→カーテンで目隠しされた扉のなかから石をつかみ出す、といった順番になっています。

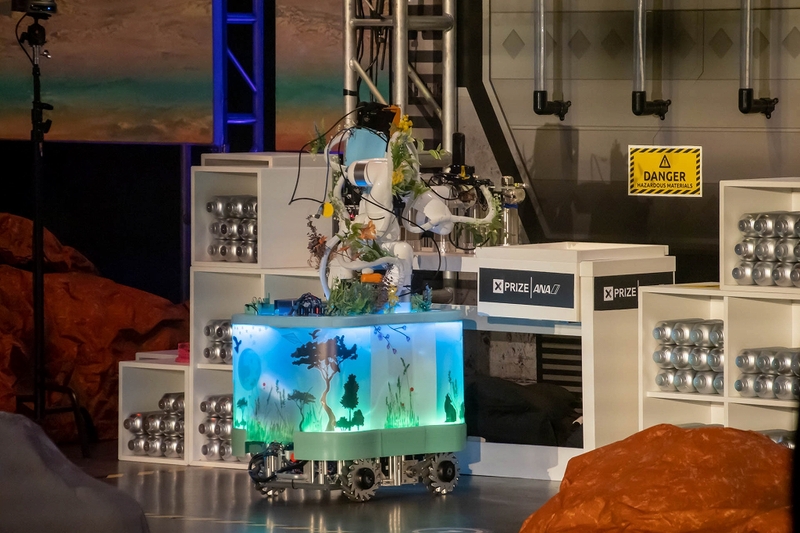
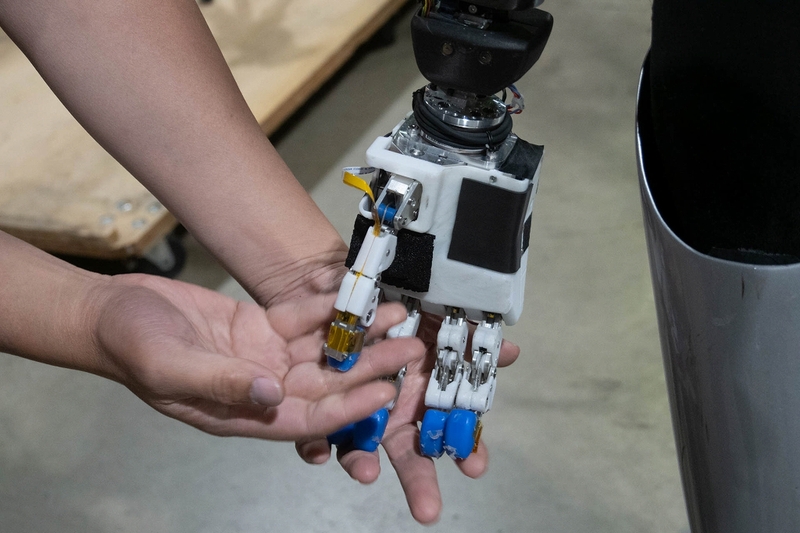
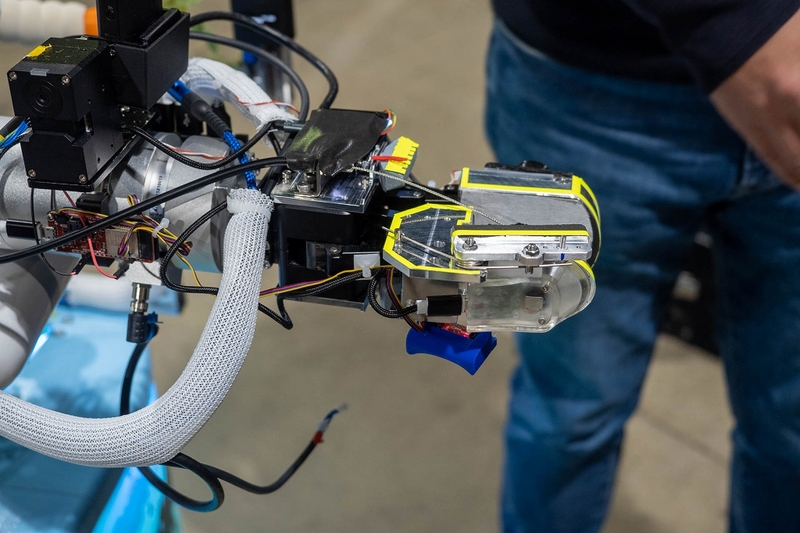
このコースを25分以内に完走し、そのタイムを競うのが今回のコンテストの内容。各ミッションの達成度などもポイントに加算されるものの、優勝して賞金を得るためには完走が条件となっています。そのため完走には、ロボットに装着したマニピュレーターをいかに上手に動かすかというのがポイントとなってきます。特に後半のドリルを握ったり、見えない場所のものを掴むといった動作は、ロボットの指のトルクも必要ですし、ハプティクス(ものに触れているかのようなフィードバック)の正確さも必要です。
日本からは2チームが参戦 どちらも独創的なロボットを使ったが……
日本からは産業技術総合研究所 (AIST)とフランスの国立科学研究センター (CNRS)を中心とした「Janus」と、三菱電機の先端技術総合研究所 春名正樹氏を中心とした「Last Mile」の2チームが参加しています。
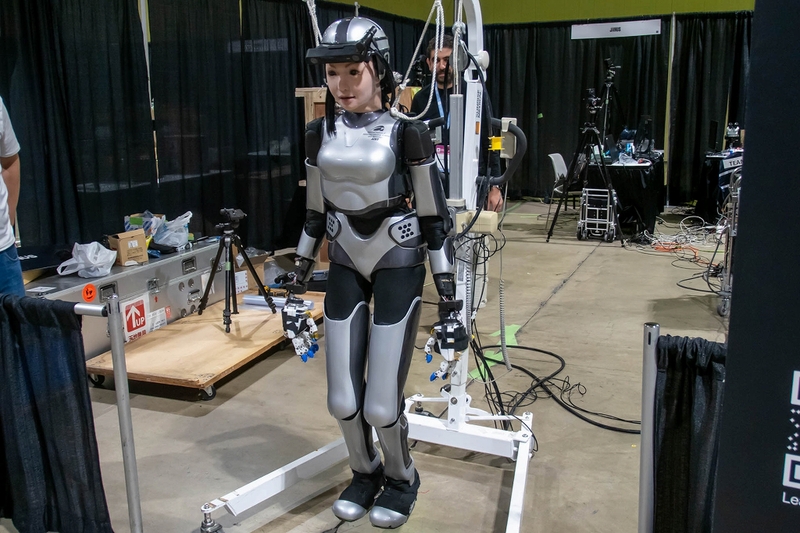
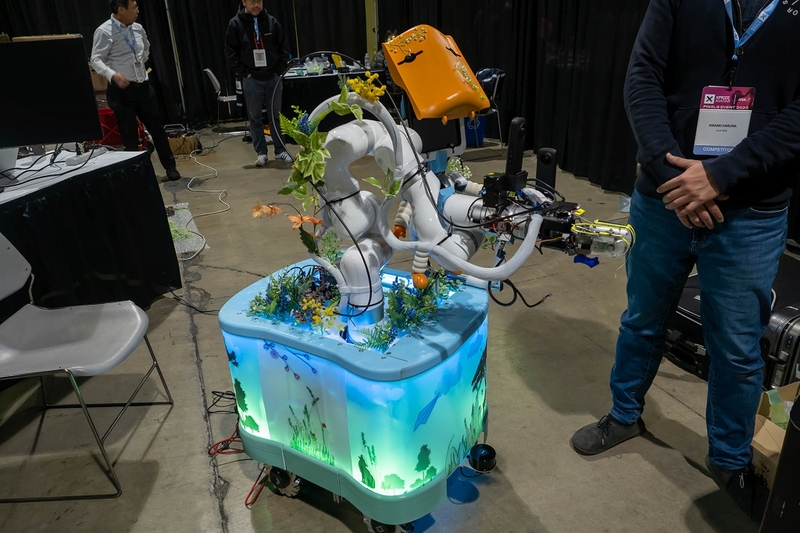
同じ日本チームではあるものの、今回のコンテストへのアプローチはかなり違っていて、Janusは産総研が開発している女性型二足歩行ロボットを今回のコンテストに向けて改良・チューニングしたものを使用。一方Last Mileは、低コストかつシンプルに各ミッションをクリアできるように開発しています。そのためLast Mileは車輪を使って移動となります。




ちなみにほかのチームもほとんどが車輪での移動。ベースとなるロボットはもともと二足歩行ですが、今回のコンペティションのため台車に乗せて動くようにした設計のチームも多くみられました。実際こういったコンテストでは、二足歩行はやはり不利で、残念ながらJanusのロボットは、大会前日のテスト時に転倒し故障してしまったため、リタイアとなっています。

Last Mileもセカンドラウンドには進出したものの、完走にまでは至りませんでした。ちなみに完走できたチームは3つほどで、完走率はかなり低くなっています。ただしJanusの神永拓氏とLast Mileの春名氏の両名とも、コース設定自体はそこまで難しいものではなく、自分たちのアバターロボットで完走は可能と話していました。

完走率の低さは最初からの狙い 操作性こそが勝敗を決するポイントだった
この開発側の認識と実際の完走率の低さこそ、実はANAとXPRIZEが狙っていたもの。今回のコンペティションでは、アバターロボットを操作するのは開発したチームのメンバーではなく、審査員が事前に45分ほどレクチャーを受けて操作するというレギュレーションになっています。

そのためハードウェアのできはもちろん、操作性というソフトウェアも重要なポイントというわけです。今回優勝したドイツチーム「NimbRo」で操縦を担当した審査員に話を聞いたところ、「自分の腕のように操作できた。特に腕をどの辺に動かすか視線で確認しながらでき、そのズレが全然なかった」と話しています。「NimbRo」のアバターロボットは、1回目、2回目ともに10分を切るタイムで完走。各種動作も迷いなくスムーズで、ある意味ぶっちぎりでの優勝でした。

ほかのチームのアバターロボットみていると、操作が恐る恐るといった感じ。それでいていざ動かすとなると、エラーが出てしまうほど大きく動かしてしまい、まともに操作できなくなるというケースも多く見られました。
開発した人が操作する場合には、ある程度の動作のクセやコツをわかっているので、的確かつ安全に動作させられますが、初めて操作する人の場合はそうはいきません。今回、ANAとXPRIZEがこのようなレギュレーションにしたのは、「アバターをいかにストレスなく、自分の身体と同じように操作できるか。さらにHMD(ヘッドマウントディスプレー)やコントローラーを触ったことがない、慣れてない人でも簡単に使えるか」をポイントとしていたとのこと。
つまり今回のコンペティションでは、ハードウェア的にはどのチームもミッションをクリアできる性能はあったが、この「ユーザーの使いやすさ」という点に注力したチームが勝利したという感じです。たんなる技術の高さだけ競うのではなく、「人が使うサービス」には何が重要かというのがよく分かるコンペティションでした。

この記事に関連するニュース
-
韓国4足歩行ロボット、マラソン42.195km完走…「ライボ2」が世界初、4時間19分52秒
KOREA WAVE / 2024年11月19日 8時0分
-
「飛行機のプッシュバック、一番うまい人は誰だ!」 伊丹空港の隅で密かに実施されたANAの「珍しい大会」とは
乗りものニュース / 2024年11月16日 10時42分
-
大阪電気通信大学「RPwheel Project-Team OECU&R-Techs」が「CYBATHRON 2024」で世界3位 ― 革新性・有用性・汎用性に優れた車いすを開発したチームに贈られる「Jury賞」とダブル受賞
Digital PR Platform / 2024年11月13日 8時5分
-
追手門学院大手前中高が10年連続で世界大会出場!世界で約60,000人以上が参加する最大級のロボットコンテスト
PR TIMES / 2024年11月2日 13時40分
-
PUBG MOBILEの世界大会「2024 PUBG MOBILE GLOBAL CHAMPIONSHIP」の日本向け配信を実施
PR TIMES / 2024年11月2日 11時40分
ランキング
-
1メルカリ、不正利用へのサポート強化と補償方針を発表 ネットで意見「当たり前」「個人的には期待」「悪意のあるやつは排除して」
iza(イザ!) / 2024年11月25日 13時21分
-
2AppleのSafariに関し、英CMAが「ブラウザ市場に悪影響」と調査勧告
ITmedia NEWS / 2024年11月25日 7時25分
-
3スタバ福袋当選発表に悲喜こもごも SNS「3度目の正直来た」「外れてうつになりそう」
iza(イザ!) / 2024年11月25日 12時11分
-
4新機能がいっぱい!iPadOS 18で進化した「メモ」アプリを使いこなそう - iPadパソコン化講座
マイナビニュース / 2024年11月25日 11時34分
-
5「これは興味深い」 生のレモンを38日間放置したら…… “目を疑う変化”に衝撃の声 「地球のようだ」
ねとらぼ / 2024年11月24日 8時30分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください





