

デジタルツイン指向の自動運転シミュレーター、ティアフォーがオープンソース公開
ASCII.jp / 2022年11月28日 17時0分

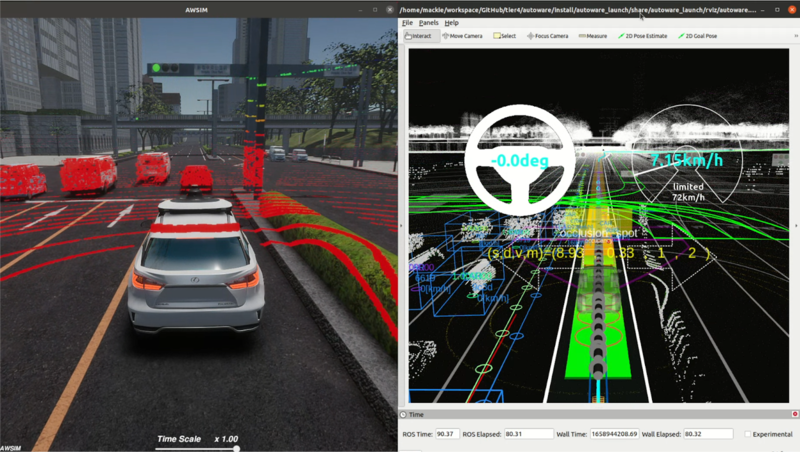
ティアフォーは11月28日、安全な自動運転システムを効率的に開発することを目的としたデジタルツイン指向の自動運転シミュレーター(Scene Simulator for Autoware - AWSIM)をオープンソースで公開した。
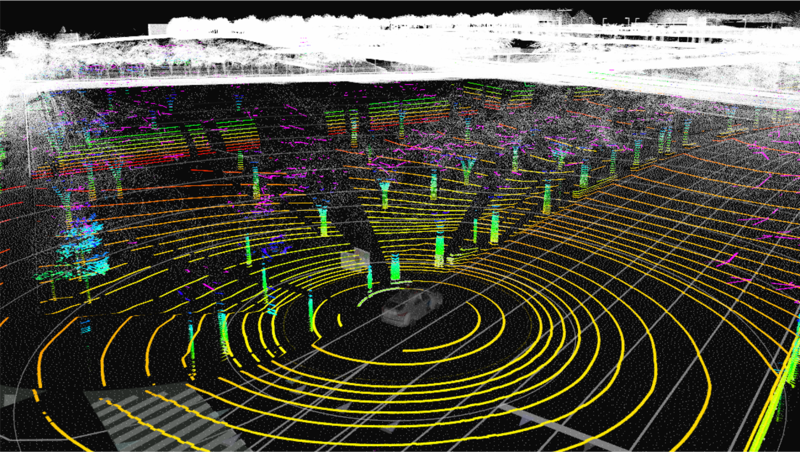
自動運転シミュレーターは、自動運転ソフトウェアの評価・検証を実現するために、3次元モデル地図をベースに仮想世界を構築し、リアルな物理モデルを用いたセンサーデータモデルと組み合わせることで、現実世界の運転および交通環境をシミュレーションする。また、今後、機械学習向けに学習用合成データを自動生成することで、機械学習を活用した物体検出や環境認識の学習および検証コストを大幅に低減できるようになるという。
同社のWeb.Autoは、自動運転シミュレーション、CI/CDデータパイプライン、データ管理、運行管理、遠隔監視を実現するクラウドネイティブかつエッジ集約型のDevOpsプラットフォーム。Web.Autoがこれまで実施してきた自動運転ソフトウェアの検証は、シナリオベースの運転および交通環境シミュレーション、走行ログを用いた現実事象の再現テストが中心だった。今回発表したデジタルツイン指向のエンドツーエンドシミュレーションがWeb.Autoのプラットフォームに加わることで、より安全な自動運転を実現するための目的に応じた効率的な検証ができるようになるという。
Web.Autoはアマゾン ウェブ サービス(AWS)のクラウドプラットフォームを採用している。また、デジタルツイン指向の自動運転シミュレーターはリアルタイム3Dプラットフォームで世界をリードするUnityの技術を採用している。

この記事に関連するニュース
-
NVIDIA、業界のソフトウェアリーダーと共に Omniverse リアルタイム物理デジタルツインを発表
PR TIMES / 2024年11月19日 10時0分
-
日本のクラウド リーダーが AI 時代の産業変革に向けて NVIDIA AI インフラを構築
PR TIMES / 2024年11月13日 15時15分
-
トヨタとNTT、5000億円規模「AI安全基盤」の中身 事故を未然に防ぐ業界共通のプラットフォーム
東洋経済オンライン / 2024年11月7日 10時0分
-
dSPACEがGeoMate社と業務提携
PR TIMES / 2024年11月6日 12時40分
-
ティアフォー、一般道における自動運転レベル4の認可を取得 自動運転移動サービスの社会実装へ
PR TIMES / 2024年10月31日 13時15分
ランキング
-
1HD-2D版『ドラクエ3』勇者「俺だけバラモス倒せなかった…」←なんで? 嘆きの声続出の理由
マグミクス / 2024年11月25日 17時25分
-
2ビューカード、顧客との通話内容を録音したSDカード20枚を紛失
ASCII.jp / 2024年11月25日 17時5分
-
3メルカリ、不正利用へのサポート強化と補償方針を発表 ネットで意見「当たり前」「個人的には期待」「悪意のあるやつは排除して」
iza(イザ!) / 2024年11月25日 13時21分
-
4スタバ福袋当選発表に悲喜こもごも SNS「3度目の正直来た」「外れてうつになりそう」
iza(イザ!) / 2024年11月25日 12時11分
-
5「不要なスマホなどをdポイントと交換」 ドコモ、小型機器の買い取りに挑戦 都内の25店舗で
ITmedia Mobile / 2024年11月25日 16時21分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください





