

NTTドコモと慶大、5G高信頼低遅延通信を経由し、ヒトの手を動かして感じ取れる手応えをロボット上で再現する実証実験に成功
ASCII.jp / 2023年1月27日 17時30分
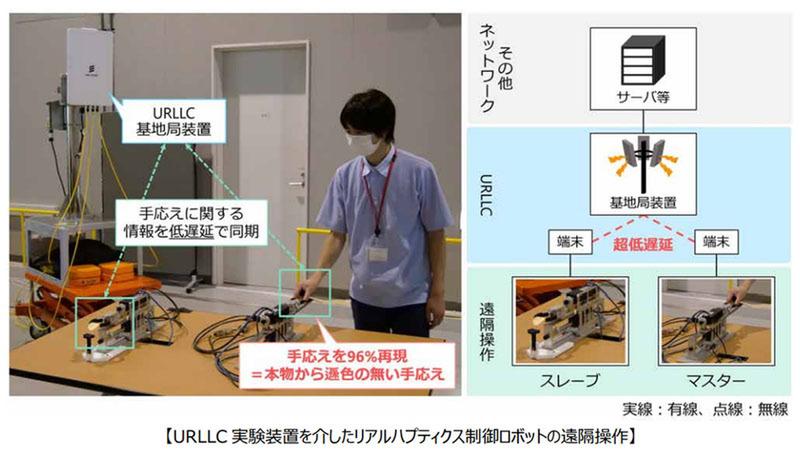
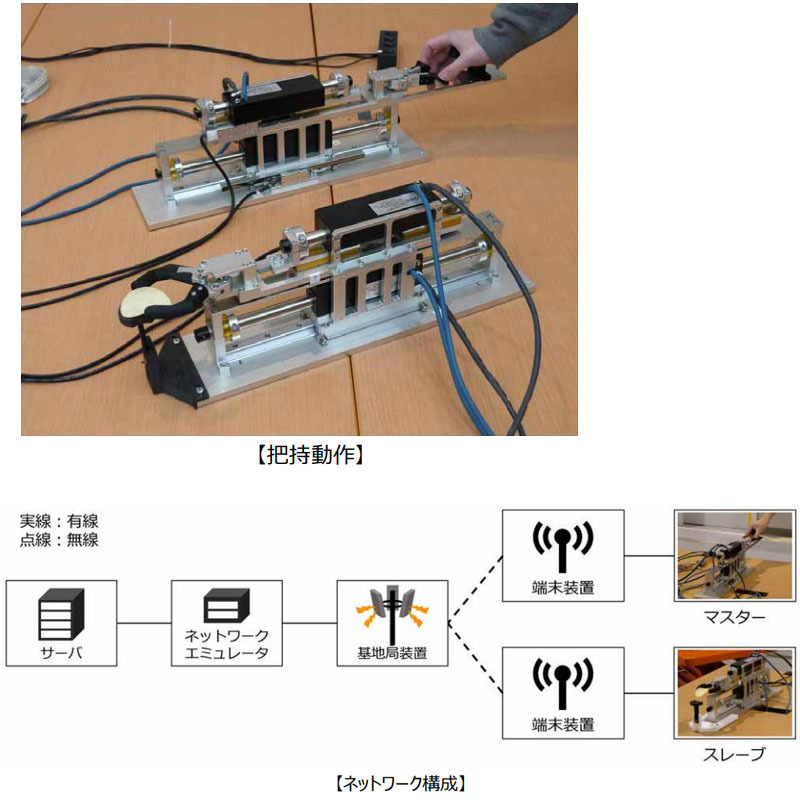
NTTドコモと慶應義塾大学ハプティクス研究センターは1月25日、5G高信頼低遅延通信「URLLC(Ultra-Reliable and Low Latency Communications)を用いてヒトの手を動かして感じ取れる手応えをロボット上で再現する実証実験に成功したと発表した。 慶應義塾大学ハプティクス研究センターが開発したロボティクス技術「リアルハプティクス」 を活用したロボットの無線遠隔操作実現に向けたもの。リアルハプティクスは、ヒトの指先や手のひらを動かして感じ取れる手応えをロボット上で再現可能な技術。ヒトが感じる繊細な感覚を遠隔地に伝えるリアルハプティクスを実現するためには低遅延な通信状態を変動なく保つ必要があるが、モバイルデータ通信環境では実現は困難とされていた。 今回、超高信頼かつ低遅延の無線技術であるURLLCを活用し、遅延時間の変動を限りなく抑えることでリアルハプティクスを用いたロボットの無線遠隔操作において、本物の物体を直接つかむ手応えに限りなく近い水準である再現度96%を実現したという。 URLLCを介し固定遅延を追加しなかった場合は96%の手応え量を再現できたほか、固定遅延の追加量が30ms以下であれば80%以上の手応え量を再現できていることも確認し、この数値は有線通信で得られる手応え量とほとんど同じという。 この実証実験の成功により、屋外での利用はもちろん立ち入ることの難しい場所での活用など、新たなユースケースの広がりやロボット市場の拡大が期待できるとしている。

この記事に関連するニュース
-
NTTがIOWNの実用化加速 800Gbpsの超高速通信を実現、5G基地局の省電力化も視野に
ITmedia Mobile / 2024年11月25日 12時21分
-
6G時代の最適な通信品質をめざし、デジタルツイン技術を活用してさまざまなシーンに応じた通信性能を可視化する実証実験に成功
PR TIMES / 2024年11月20日 17時45分
-
リアルタイム映像伝送等を利用した災害医療体制の強化に関する実証を開始
@Press / 2024年11月19日 14時0分
-
ドローンポートSkydio Dockと低軌道衛星Starlinkを活用した配水ポンプ場の自動巡回に成功
@Press / 2024年11月19日 10時0分
-
「AI-RAN」でソフトバンクのネットワークは何が変わる? ユーザーのメリットとビジネス上のインパクトを解説
ITmedia Mobile / 2024年11月16日 9時35分
ランキング
-
1「車が憎い」 “科捜研”や“朝ドラ”出演俳優、交通事故で死去 「忘れないでください」落語家の兄が悲痛のコメント
ねとらぼ / 2024年11月27日 17時8分
-
2「Windows 11 2024 Update(バージョン24H2)」の既知の不具合まとめ【2024年11月27日現在】
ITmedia PC USER / 2024年11月27日 17時50分
-
3楽天モバイル、関東での5G(Sub6)エリア拡大計画を前倒し 最大1.6倍→2.1倍にまで拡大
ITmedia Mobile / 2024年11月27日 15時31分
-
4クレジットカードを少額で不正利用されていない? 巧妙な新手口を解説
ITmedia エンタープライズ / 2024年11月26日 7時15分
-
5「天才発見」「涙出てきた」 ダイソー商品で“あの平成女児アイテム”が作れる……!? 目からウロコの“神アイデア”に「思いつく人ほんますごい」
ねとらぼ / 2024年11月27日 7時10分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください





