

確率共鳴を利用した遠距離物体認識技術を開発 ~自動運転システムにおける高精度な物体検知が可能に~
@Press / 2018年7月3日 13時0分
芝浦工業大学(東京都港区/学長 村上雅人)の伊東敏夫教授(システム理工学部機械制御システム学科)は、“確率共鳴”という現象を用い、より遠距離、広範囲にある物体を認識する新技術を開発しました。
現在、自動車の自動運転技術における物体認識技術が進んでおり、歩行者などを認識するため、主に用いられるレーザーレーダー(LiDAR:light detection and ranging)が用いられています。しかし、現状では遠距離にある物に対する認識精度は低いものでした。これに、ノイズを印加し遠距離での認識精度を向上させる“確率共鳴”という現象を利用することで、物体を識別できる距離を延ばすこと新技術を開発しました。これは、ザリガニが外敵や水流の動きを感知する際に用いられる現象です。これにより、運転支援システムや自動運転技術のさらなる発展向上が期待されます。
この物体認識装置および物体認識方法は、7月5日(木)に行われる、新技術説明会にて発表されます。
【芝浦工業大学 新技術説明会】
日時:2018年07月05日(木)13:20~15:55
会場:JST東京本部別館1Fホール(東京・市ケ谷)
主催:科学技術振興機構、芝浦工業大学
後援:特許庁、関東経済産業局
■背景
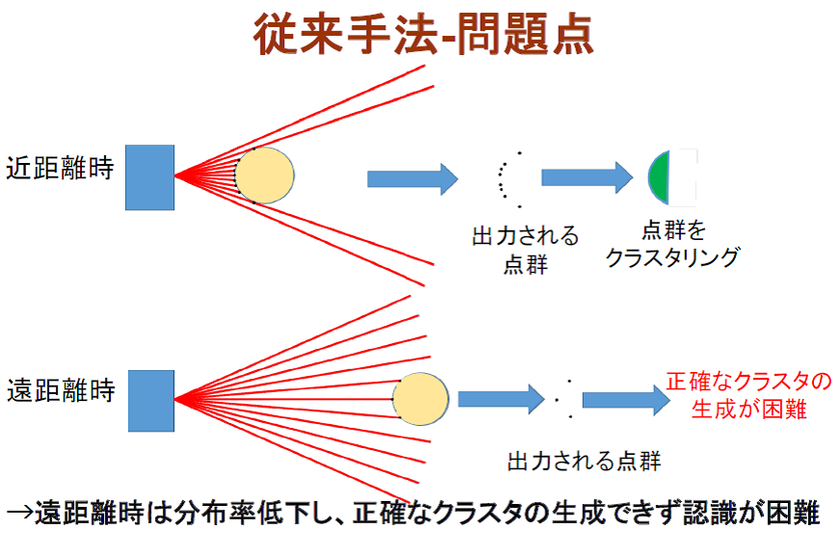
自動運転技術を発展させるにあたり、自己位置推定(次の交差点までの距離を正確に計算、自車がどの位置にいるのか把握)、外界認識(センサ類を複合的に活用し周りの環境を認識)、行動計画(自車の位置と向き速度などその他の要素を総合的に判断)、車両制御(ステアリングやブレーキの操作)などが大きな要素となっています。なかでも自動運転では外界認識が特に重要であり、周辺物体を認識することにより、安全な走行が可能となります。しかし、現在の自動運転技術で主に用いられているLiDARを使用した手法では、遠距離であるほど計測した点の分布率が低くなりクラスタリングが作成できませんでした。
画像1: https://www.atpress.ne.jp/releases/160268/LL_img_160268_1.png
従来手法と問題点
■遠距離での物体認識技術を実現
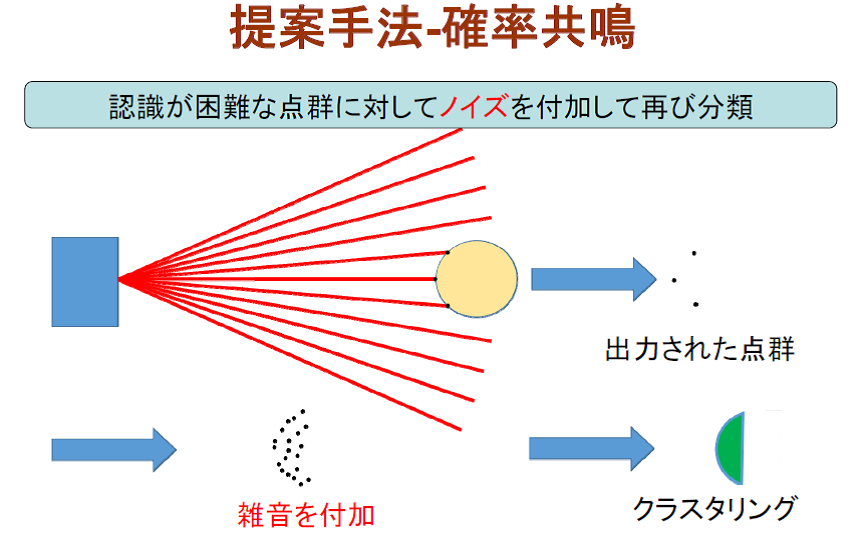
そこで伊東教授はこの課題に対し、信号にノイズを加えることで、ある確率の下で信号が強まり、検知能力が向上する現象である“確率共鳴”を用いることで、最適なノイズを発生させることにより物体を識別できる距離を延ばす技術を開発しました。これにより、LiDARの遠距離認識性能の改良や遠距離での反射点群密度の向上が可能となり、計測地点から20メートル以上80メートル以内の歩行者、二輪車、車両に対して実験を行い、認識性能の改善がみられました。
提案手法と確率共鳴
https://www.atpress.ne.jp/releases/160268/img_160268_2.png
■自動運転技術の実用化へ
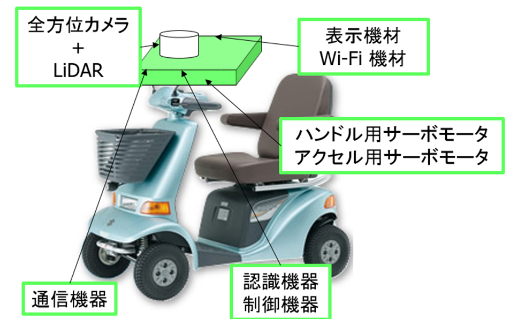
この技術は、自動車だけでなく、自動運転ドローンや自律移動ロボットの外界センサへの使用も期待されます。確率共鳴の応用に着目すると、LiDAR以外の画像処理やレーダーへの応用展開することも可能です。本技術の実用化の一歩として、シニアカーに装置を後付けして自律移動モビリティを開発し、複数の研究室との共同プロジェクトとして2020年の完成を目標に研究を進めています。
実用化イメージ
https://www.atpress.ne.jp/releases/160268/img_160268_3.png
※特願2018039126「物体認識装置および物体認識方法」、出願人:学校法人 芝浦工業大学
詳細はこちら
プレスリリース提供元:@Press

この記事に関連するニュース
-
遠距離恋愛支援システムやローカル環境でのAR(拡張現実)、自己位置推定ロボット、交差点における交通量調査の自動化など「Japan Robot Week 2024」(東京ビッグサイト)に金沢工業大学情報工学科 中沢 実研究室が出展。
Digital PR Platform / 2024年9月10日 14時5分
-
「Japan Robot Week 2024」に情報工学科 中沢 実研究室が出展。9月18日~20日 東京ビッグサイト
共同通信PRワイヤー / 2024年9月10日 13時30分
-
【東芝】小型化と世界最高レベルの精度を両立した物体の動きや姿勢を検出する「慣性センサーモジュール」と、同モジュールを用いた「可搬型ジャイロコンパス」を開発
Digital PR Platform / 2024年9月2日 10時0分
-
「2ナノ半導体」量産挑むラピダスの地政学的優位 日の丸半導体、「いまさら無理」でもない理由
東洋経済オンライン / 2024年8月22日 14時0分
-
マクニカ、過酷な環境下でも安定した自動運転車両の姿勢情報などを取得できる Movella社のIMUセンサー「Xsens MTi Products」の取り扱いを開始
@Press / 2024年8月22日 10時0分
ランキング
-
1高齢者のダイエットは危険!実は寿命を削ってしまう可能性もあることが判明
THE GOLD ONLINE(ゴールドオンライン) / 2024年9月19日 11時0分
-
2マイナ保険証では"大損"する人が続出…廃止される健康保険証だけに記載された最重要情報で医療費は雲泥の差
プレジデントオンライン / 2024年9月19日 10時15分
-
3ローソン、107円になる「長すぎるパン」を発売 「大きすぎるパン」も KDDIと共同開発した背景
ITmedia ビジネスオンライン / 2024年9月19日 16時44分
-
4日系企業、社員の一時帰国容認も=邦人に募る不安―中国・男児襲撃事件
時事通信 / 2024年9月19日 21時1分
-
5お金持ち流!100円ショップで買うもの・買わないもの
オールアバウト / 2024年9月18日 21時40分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください






{kind=link}
{kind=link}
{kind=link}