

民間月面探査チーム「ハクト」、Google Lunar XPRIZEに挑戦する月面探査ローバーのプレフライトモデルを発表
@Press / 2014年9月30日 16時0分

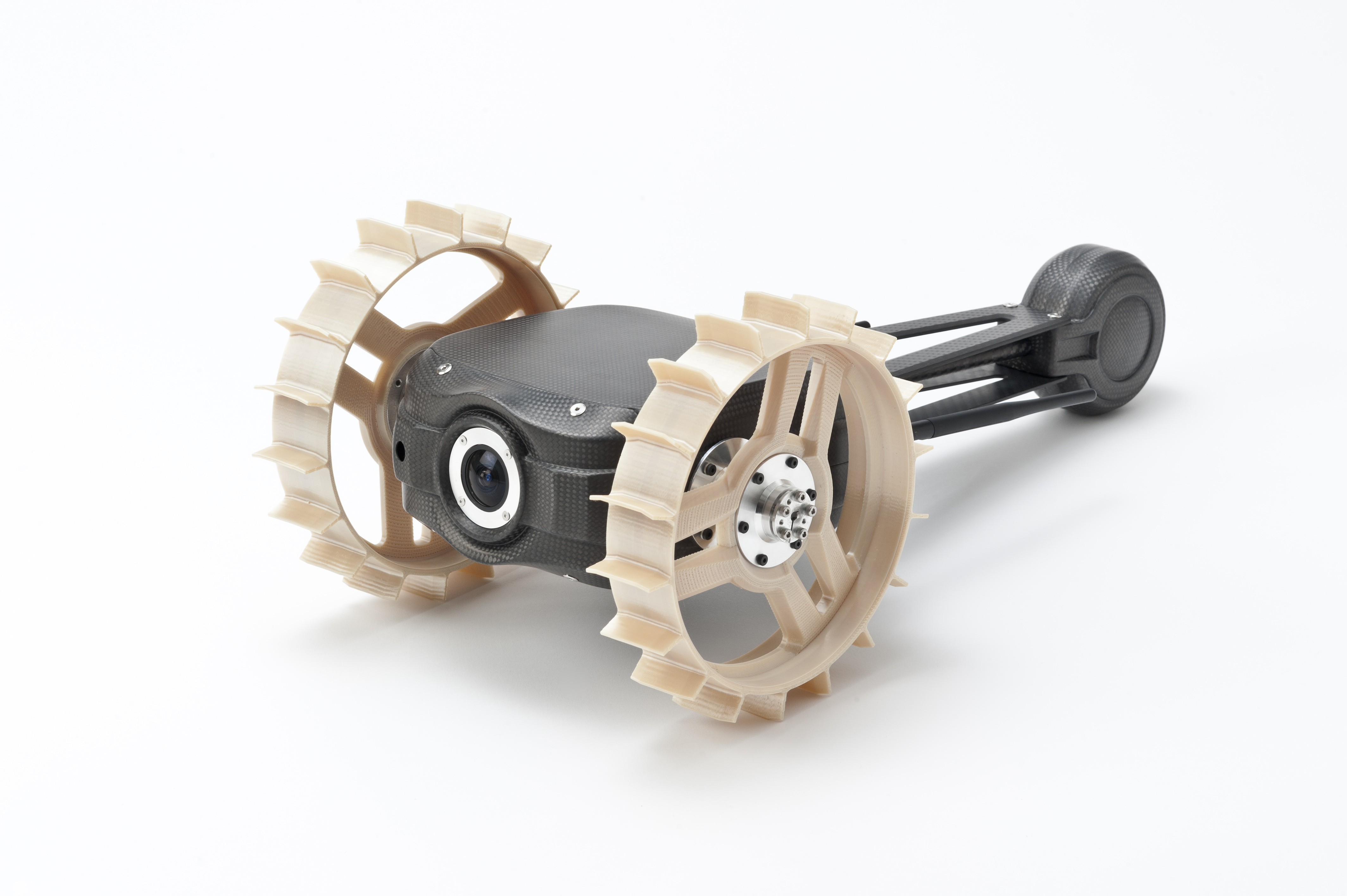
株式会社ispace(東京オフィス:東京都港区麻布台)が運営する日本初の民間月面探査チーム「ハクト」は、Googleによる賞金総額3,000万ドルの国際宇宙開発レース「Google Lunar XPRIZE」(以下 GLXP)に挑戦する月面探査ローバーのプレフライトモデル、デュアルローバーの「Moonraker」と「Tetris」を発表します。GLXPとは、民間組織による月面無人探査を競う総額3,000万ドルの国際賞金レースです。ミッションは、月面に純民間開発の無人探査機を着陸させ、着陸地点から500m以上走行し、指定された高解像度の動画や静止画データを地球に送信すること。加えて、このMoonrakerとTetrisは、ハクトオリジナルミッション、世界初の月面の縦孔探査を行うよう設計されています。
ハクトの月面探査ローバーは、今年2月にGLXPが設ける中間賞の書類審査を通過した5チームの1つとして、モビリティサブシステム中間賞(走行系)のファイナリストに選定されています。今後、本プレフライトモデルに対して宇宙機として機能することを証明するための試験を実施し、中間賞の獲得を目指しています。
■ミッション
MoonrakerとTetrisは、GLXPにより課せられたミッションに加え、世界初のハクトだけのオリジナルのミッションを行うように設計されています。
◯月面を500m走行(GLXPミッション)
表面温度が-150℃以下から100℃以上という厳しい温度環境の中、クレーターや岩石を避けながら月面を500m以上走行します。
◯月面からの動画・静止画を送信(GLXPミッション)
ローバーの眼の前に広がる360度の景色を、搭載しているHDカメラで撮影し、地球に送信します。
◯月面の縦孔探査(ハクトオリジナルミッション)
MoonrakerとTetrisをテザー(細いロープ)で結合した「デュアルローバー」によって、月面に存在する「縦孔」を探査します。「縦孔」とは、日本の月面探査衛星「かぐや」によって発見された月面に垂直に開いた穴で、火山活動によって生成されたと考えられています。Tetrisが降下して縦孔の内部を探査することを目指します。縦孔は、月の誕生をよりよく理解する鍵となることが期待されており、将来人類が長期滞在する基地を設営するための有力候補地でもあります。
■基本設計
ミッションに適した最小限の機能を搭載する超小型・軽量ローバーを開発しました。宇宙への打上費は重量に比例して上がるため、軽量化が求められ、日本の得意とする小型化思想をふんだんに取り入れています。また、低コスト化のため民生品の部品を多く活用しています。
<Moonraker>
サイズ w480×d600×h540mm
重量 10kg
<Tetris>
サイズ w270×d540×h210mm
重量 2kg
■主な仕様
◯360度カメラ
月面で唯一の眼となるカメラは、三角錐ミラーを採用し、360度を一度に撮影できるカメラシステムを搭載しています。
◯ SLAM技術
360度カメラを使い、ローバーの周りの環境を正確に把握し自己位置推定を行います。
◯ホイール
月面は、レゴリスと呼ばれるパウダー状の砂で覆われています。この非常に軟らかい表面でも軽々走行できるホイールを開発しています。
◯CFRP構造
軽くて強い素材であるCFRP(炭素繊維強化プラスチック)をボディーなどに多用。この素材は、近年、航空機やロケットの先進構造材料としても使われています。オートクレーブにて成形された事により、ハクトの超小型ローバーは、軽量化及び高剛性(高強度)を実現。オフィシャルパートナーである埼玉県の株式会社アールディエスがエクステリアデザイン及び製作を手がけています。
◯熱対策
月面は、昼は100℃以上、夜は-150℃以下にもなる、非常に厳しい温度環境です。このような過酷な条件でもローバーが動作できることを、熱真空チャンバーを使った試験等で検証していきます。
■今後の計画
本プレフライトモデルに対して、GLXP審査員団の審査のもと環境試験を実施します。また、屋外フィールドでの走行試験については、公開実験を行う予定です。
中間賞の結果発表及び授賞式はGoogle本社にて行われる予定です。
■ハクトについて
ハクトは、株式会社ispaceが運営する、日本で唯一GLXPに参加するチームです。東北大学大学院工学研究科航空宇宙工学専攻教授であり、株式会社ispace CTOの吉田 和哉氏を中心とした月面探査ローバーの開発と、日本でのチームの広報活動を担当しています。
■Google Lunar XPRIZEについて
Googleがスポンサーとなり、XPRIZE財団によって運営される、民間組織による月面無人探査を競う総額3,000万ドルの国際賞金レースです。ミッションは、月面に純民間開発の無人探査機を着陸させ、着陸地点から500m以上走行し、指定された高解像度の動画や静止画データを地球に送信すること。1位のチームには賞金2,000万ドル、2位のチームには賞金500万ドルが与えられます。現在、世界各国から18チームが参加しています。
■Google Lunar XPRIZE中間賞について
2013年11月にXPRIZE財団とGoogleが発表した中間賞は、順調に開発を進めているチームを経済的にサポートし、更なる投資や認知度を上げることを目的としています。そのために、月面ミッション達成で授与される総額3,000万ドルの賞金に加え、総額600万ドルを新たに中間賞として設定しています。中間賞はイメージング、モビリティ、ランダーシステムの3種類があり、ハクトは現在、モビリティサブシステム中間賞(走行系)のファイナリストとしてノミネートされています。
詳細はこちら
プレスリリース提供元:@Press
【関連画像】


この記事に関連するニュース
-
ispace、HEX20将来の月周回軌道への衛星輸送における協業について覚書を締結
PR TIMES / 2024年10月17日 18時45分
-
ispace、「IAF Excellence in Industry Award」受賞!
PR TIMES / 2024年10月16日 18時15分
-
ispace、月面探査車を活用するミッション実施を目指し、韓国の宇宙ロボティックス企業UELとの覚書を締結
PR TIMES / 2024年10月15日 18時45分
-
ispace、米国機関投資家ハイツ・キャピタル・マネジメント・インクを割当先とする、第三者割当増資を発表
PR TIMES / 2024年10月11日 18時45分
-
ispace、将来の月共同ミッション実現を目指し、Asteroid Mining Corporationとの覚書を締結
PR TIMES / 2024年10月9日 17時45分
ランキング
-
1わずか1週間で閉店「りゅう社長」"撤退劇"の真相 「話題作り?」との声もあったが実際は全然違った
東洋経済オンライン / 2024年10月25日 8時30分
-
2「事業撤退→年2000万個」チーズデザート成功の訳 ひとりの社員の熱意が、会社を動かした
東洋経済オンライン / 2024年10月25日 8時40分
-
3「問えるのは欲望がある人間だけなんです」AI開発、シリコンバレーの最前線で今起きていること
文春オンライン / 2024年10月25日 6時0分
-
4「年金だけで生活できない」はウソである…社労士が解説「国が認めている節税テクニック」の知られざる効果
プレジデントオンライン / 2024年10月24日 18時15分
-
5便利な「無料AI翻訳」なぜ仕事で使うとヤバいのか リスクは入力した情報の二次利用だけではない
東洋経済オンライン / 2024年10月25日 8時0分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください





