

“サイボーグゴキブリの群れ”をコンピュータで操作 阪大らがナビシステム提案
ITmedia NEWS / 2024年4月23日 8時5分
“サイボーグゴキブリの群れ”を使ったナビシステム、阪大らが提案
大阪大学とシンガポールの南洋理工大学に所属する研究者らが発表した論文「Natural-artificial hybrid swarm: Cyborg-insect group navigation in unknown obstructed soft terrain」は、生きている昆虫(マダガスカルオオゴキブリ)に小型の電子制御装置を取り付けてサイボーグ化し、複数のサイボーグゴキブリを群れとして制御することで、未知の複雑な地形を移動させるナビゲーションシステムを提案した研究報告である。
従来のロボットは、障害物回避や未知環境への適応、長時間の稼働といった点で限界があった。それに対し、昆虫のサイボーグ化は、昆虫の優れた移動能力や環境適応能力、エネルギー効率の高さを生かせる可能性がある。しかし、個々の昆虫への刺激に対する反応のばらつきにより、複数のサイボーグ昆虫を協調制御することは技術的に難しい問題であった。
この研究では、観光客を案内するツアーガイドグループの行動から着想を得た制御アルゴリズムを考案。このアルゴリズムは、リーダー1体とフォロワー複数体で構成し、リーダーのみがゴールの位置情報を知っている。
各サイボーグゴキブリが近くに仲間が十分にいるときは自由に動き回ることを許容し、離れすぎているときはグループに近づくように電気刺激で制御する。つまり、ゴキブリ本来の能力や自律性を活用しつつ、ときに電気刺激で制御することでバッテリー消費を抑えたシステム全体のロバスト性を高めることができる。
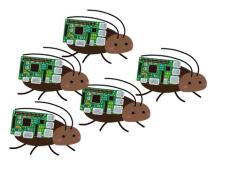
各ゴキブリには、バッテリー、小型コンピュータ、中央コンピュータと無線通信するアンテナで構成される「バックパック」を装着。またゴキブリの両側にある感覚器官に電極を埋め込んでいる。個々のゴキブリに搭載した小型コンピュータがそれら電極に電圧を印加することでゴキブリの移動方向を制御する。
提案手法を、1匹のリーダーと19匹のフォロワーから成る20匹のサイボーグゴキブリの群れに適用し、岩や丘のある3.5m四方の砂地での走行実験を行った。その結果、10回の試行全てにおいて、リーダーを含む全てのサイボーグゴキブリが事前情報なしで障害物を越えて目的地に到達することに成功した。
また実験中、1匹が障害物にはまり込んだ際、仲間が回避しながら引っ張ることで救出したり、サイボーグゴキブリが誤ってあおむけになった際、近くの昆虫が協力して起き上がらせる興味深い行動を観察した。
この研究によるサイボーグゴキブリの群知能は、ロジスティクスや災害対応、農業など、ロボットだけでは対応が難しいさまざまな分野への応用が期待される。
Source and Image Credits: Bai, Yang, et al. “Natural-artificial hybrid swarm: Cyborg-insect group navigation in unknown obstructed soft terrain.” arXiv preprint arXiv:2403.17392(2024).
※2014年から先端テクノロジーの研究を論文単位で記事にしているWebメディア「Seamless」(シームレス)を主宰する山下裕毅氏が執筆。新規性の高い科学論文を山下氏がピックアップし、解説する。X: @shiropen2
外部リンク

この記事に関連するニュース
-
自然教育アニメ『インセクトランド』未公開話4本を含む全話が4月26日(金)~5月5日(日・祝)までYouTubeで限定配信!
PR TIMES / 2024年4月26日 15時15分
-
【中部大学】運動の学習を実現する人工小脳デバイスを開発---ロボットの制御や人の運動制御能力増強・改善への活用に期待---
Digital PR Platform / 2024年4月25日 20時5分
-
駅直結・千葉公園内に自然を愛する親子のためのコミュニティパーク『CHIBA TERRACE』2024年4月26日(金) 誕生!!昆虫目線の屋内プレイグラウンド『INSECT PARK』も同時オープン
PR TIMES / 2024年4月20日 17時40分
-
国歌のテンポが遅いと平和……でも自殺率が高く幸福度が低い? バングラデシュの研究者らが調査
ITmedia NEWS / 2024年4月19日 8時5分
-
オムロン サイニックエックス、ヒューマン・コンピューター・インタラクション分野のトップレベルの国際会議「CHI 2024」に研究論文が採択
PR TIMES / 2024年4月5日 13時15分
ランキング
-
1ジョージア大使、松屋にポーランド風ハンバーグ登場で心配「国際情勢に影響しかねない熾烈な戦いになりそう」
iza(イザ!) / 2024年5月1日 13時55分
-
2「そっち使うの?!」「これは天才」 さびだらけの鉄くぎをぐつぐつ煮込むと……? DIYに役立つ“まさかの使い道”が200万再生
ねとらぼ / 2024年5月2日 12時15分
-
3Shokzが新イヤホン2機種チラ見せ、BT付きの水泳用と新色含むカジュアル機
マイナビニュース / 2024年5月3日 13時0分
-
4CAに「ちょっといい?」と娘を連れて行かれ…… フライト中の心温まるエピソードが700万表示の反響
ねとらぼ / 2024年5月3日 20時15分
-
5「すごい請求がきた」 → “想像を絶する額の架空請求”に「太陽系丸ごと買えそう」「桃鉄終盤」
ねとらぼ / 2024年5月3日 20時0分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください





