

日産がJAXAと共同で月面探査車を開発中! その成果は市販車に役立つのか?
MōTA / 2021年12月5日 12時0分

日産 月面ローバ試作機
日産とJAXA(宇宙航空研究開発機構)が共同研究中の「月面ローバ」の試作機が公開された。現時点では地球上での試験を前提としているため空気タイヤを履いているなど月面仕様でない部分もあるが、日産が量産EVの開発で培ってきた技術を活かせるということで2020年1月より共同研究に参画している。 砂地に覆われた月面を走破する探査機の研究は市販車の電動四駆にも役立つという。一体どういうことなのだろうか。詳しく紹介したい。
月面ローバで得られるのは砂地の走破性に関する知見だ
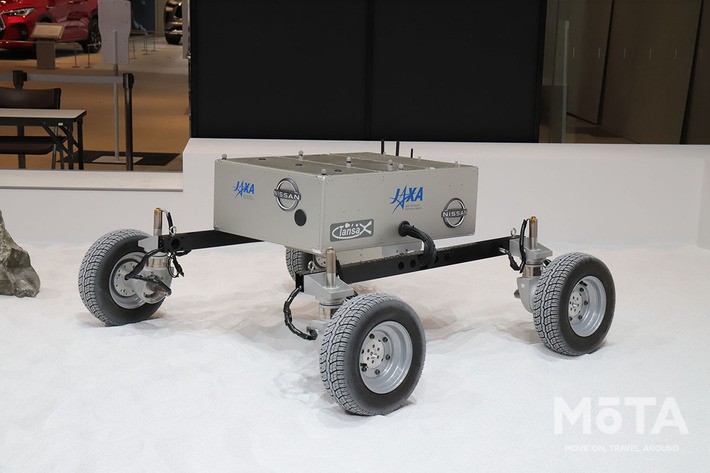
研究成果として発表されたのが、今回公開された月面ローバのプロトタイプだ。
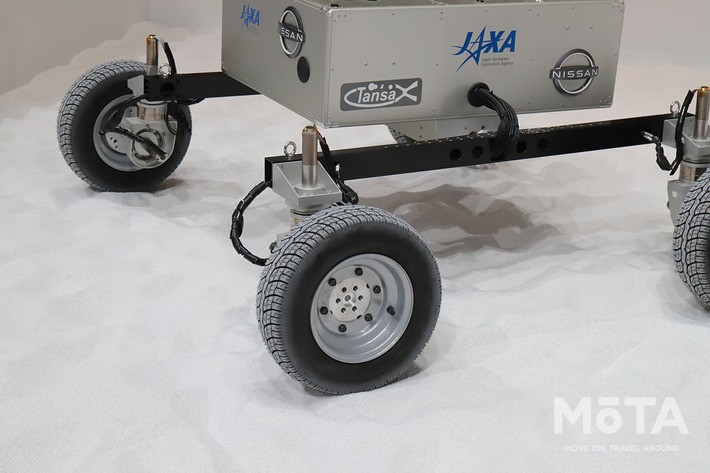
残念ながら車両についての詳細なスペックは公表されていないが、外観およびエンジニア氏に質問した範囲で判明しているのは、省電力仕様の電動車両であり、インホイールモーターの四輪駆動かつそれぞれの車輪が独立した四輪操舵仕様になっている。なるほど、EVのパイオニアともいえる日産が関わっているというのにふさわしいプロフィールの月面ローバとなっている。
砂地というのは地球上においてもスタックしやすいシチュエーションだが、もし月面のレゴリスに足を取られてスタックしてしまったら助けにいくことは実質的に不可能。そのためスタックしない走破性が求められる。
月面ローバの研究はe-4ORCEの開発につながっている
そこで日産が新型EVに搭載する「e-4ORCE」が登場する。これは電動駆動ならではの四輪駆動制御技術を示すテクノロジーの名称だが、そこで得られた知見を利用することにより月面で確実に前に進むトラクション能力を得ることを目指している。

この2つを両立することがJAXAと日産による共同研究のテーマだ。
砂地でのトラクションと消費電力の関係が数値化された
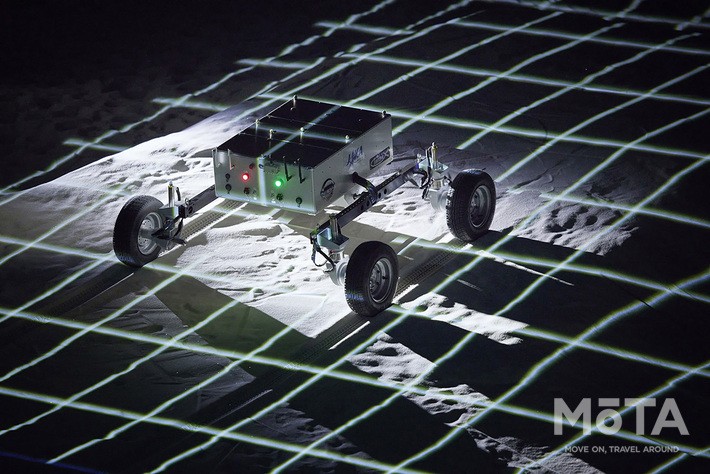
具体的には、刻一刻と状況が変わる砂の特性を数値化することが研究テーマとなっている。日産のエンジニア氏によると、現実的に世界中の自動車メーカーで砂の特性を数値化できている会社はないという。そのため経験則によってサンドモードのような砂地に合わせたセッティングは可能であっても、砂地をデジタルで再現することは困難というのが現実だ。
JAXAとの共同研究では、そうした砂の特性を数値化することがテーマだ。砂の上でタイヤがグリップする状態、またスリップする状態、さらにはタイヤが沈み込んでいく状態の原理原則を解明することにより、確実なシミュレーションを行なえるきっかけにしたいということだ。
砂地では空転させた方が駆動力を稼ぐことができる
そこで得られた知見の一例をあげると、タイヤの空転とトラクション能力にはユニークな関係があるということが判明した。素人考えでは可能な限りタイヤがスリップしないように制御したほうが前に進むと思いがちだが、ある程度までは空転させたほうが駆動力を稼ぐことができることがわかった。
ただし駆動力を増やしていくと、砂の抵抗も増えてしまう。つまり消費電力も大きくなってしまうというわけで、駆動力自体のマックスが狙えるゾーンと砂の抵抗と駆動力のバランス的にもっとも省電力なゾーンというのが異なることも明らかになった。
このように砂地特有のトラクションと消費電力の関係が数値化されたことは月面ローバの開発における2大テーマを解決することにつながるというわけだ。
砂地という悪条件下の研究は電動車の開発に生きている
では、そうしたノウハウは我々が乗るような日産の四輪駆動車にも応用できるのか。その点について伺うと、考え方自体はエンジン車のも取り入れることは不可能ではないが、制御のきめ細やかさを考えると電動車両でこそ活きてくるという。

さらにいうと意外に知られていないかもしれないが、日産のEVというのは他社EVと比べても駆動制御が細やかになっている。それは初代リーフからの特徴で、歯車のバックラッシュやドライブシャフトの捩れまでも考慮した駆動コントロールを行なっている。このあたりの違いは、よく気にして比較試乗すると誰でも感じられるほどで、EV開発の歴史が長い日産のアドバンテージだ。

市販車の電動4WD「e-4ORCE」へフィードバックしている
今回、月面ローバの試作機の発表と同時に、前後にモーターを搭載した日産の電動4WD「e-4ORCE」試作車による実験ムービーを見ることもできたが、そこでは砂地の走破性を向上させる制御をいれたことで、タイヤが沈みこむことなく確実に前進していく様子が確認できた。
この共同研究を通して得られた知見は、電動パワートレインの砂地走破性を大きく向上させる。

日産のEVにおいて前後モーターの独立駆動により走行性能を高めるe-4ORCEはコアテクノロジーになっていくことは間違いない。舗装路における前後駆動力配分によるコーナリング性能の向上などに注目しがちだが、砂地という非常に難しいシチュエーションにおける走破性向上は、SUVムーブメントにおけるEVだけの価値を創出するひとつのポイントになりそうだ。
【筆者:山本 晋也】
外部リンク
- ノートオーラの追加でノートも売れ行きが伸びた! 11月は9000台超え、拡大を続ける日産 新型「ノート」シリーズ デビューから1年の動向を追う
- 伊藤かずえさん「新車の香りがする!」31年・26万キロ連れ添った愛車「シーマ」との再会に思わず涙… 日産がシート地まで復刻させるフルレストアを実施
- スーパーGT 2022年シーズンの日産は「Nissan Z GT500」で参戦! GT-Rの歴代最多優勝記録を上回れるのか注目だ
- スイフトスポーツにロードスター! サーキット走行会参加にもオススメ! 100万円の予算で乗って遊べるコンパクトスポーツモデル3選
- 日産 新型エルグランドはアルファードの脅威となるか!? 注目はe-POWERとハンズオフ機能が自慢のプロパイロット2.0だ

この記事に関連するニュース
-
日産が新型「セレナ」発売! ミニバン初のスゴい4WD×地上高アップでパワフルな走りを実現! 「e-4ORCE車」361万円から
くるまのニュース / 2024年11月14日 9時30分
-
日産「新型“4WD”ミニバン」公開! 最低“地上高”もアップで「走破性向上」! 400万円超えもある“史上初”のe-4ORCE”搭載「セレナ」誕生
くるまのニュース / 2024年11月5日 21時10分
-
ブリヂストン 新ステージは宇宙!「月面探査」用のタイヤを共同開発 打ち上げは「近い将来」
よろず~ニュース / 2024年11月1日 20時50分
-
ブリヂストン、月面探査車向けタイヤ開発でアストロボティックと協業
マイナビニュース / 2024年11月1日 11時22分
-
ブリヂストン、アストロボティック社と月面探査車向けタイヤ開発の協業契約を締結
Digital PR Platform / 2024年11月1日 8時0分
ランキング
-
1春日部のイトーヨーカドーが閉店=「しんちゃん」のスーパーのモデル
時事通信 / 2024年11月24日 19時58分
-
2「バナナカレー」だと…? LCCピーチ、5年ぶりに「温かい機内食」提供…メニューは? 「ピーチ機内食の代名詞」も復活
乗りものニュース / 2024年11月24日 12時32分
-
3「ワークマン 着るコタツ」新モデルが登場 累計43万着を突破、人気の秘密は?
ITmedia ビジネスオンライン / 2024年11月22日 11時24分
-
4年収壁見直し、企業の9割賛成 撤廃や社保改革要請も
共同通信 / 2024年11月24日 16時22分
-
5異例の「ケーブル盗難でリフト運休」 スキーシーズン前に 捜査は継続中
乗りものニュース / 2024年11月24日 14時12分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください





