

「ドラクエ」スライムがトランスフォーム! 二足歩行ロボになる“可変式スライム”を作ってみた
ニコニコニュース / 2021年8月27日 6時0分

今回紹介したいのは、kotsumekaさんが投稿した『可変式スライムを作ってみた』という動画です。
投稿者メッセージ(動画説明文より)
軽い気持ちで始めたら、想像以上の難易度でした
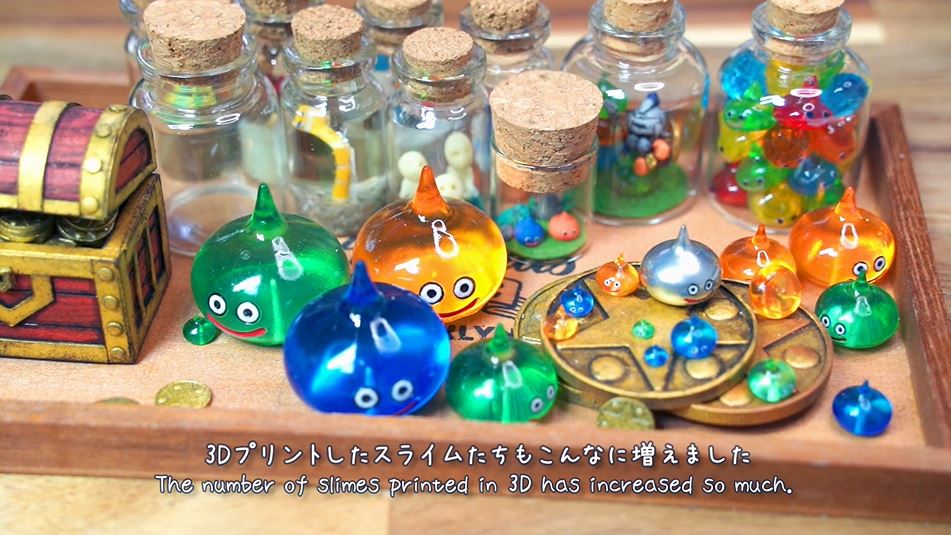
数々のスライム作品を作ってきたkotsumekaさん。
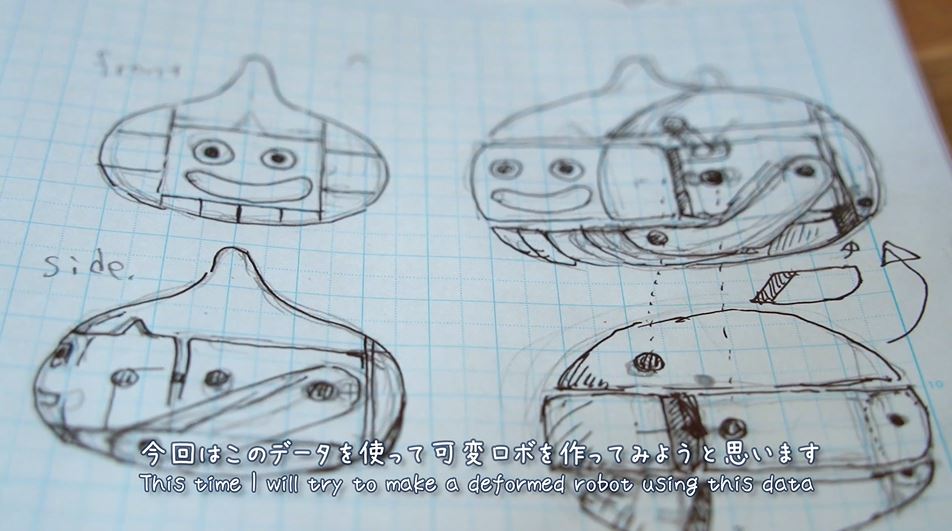
今回はスライムを可変ロボにしてみます。

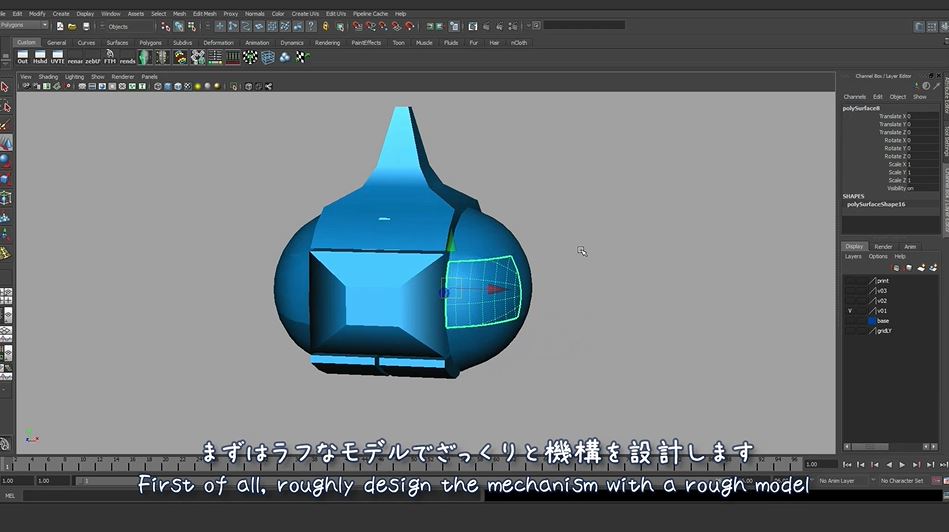

ベースのスライムのモデルから、まずはざっくりと機構を設計。
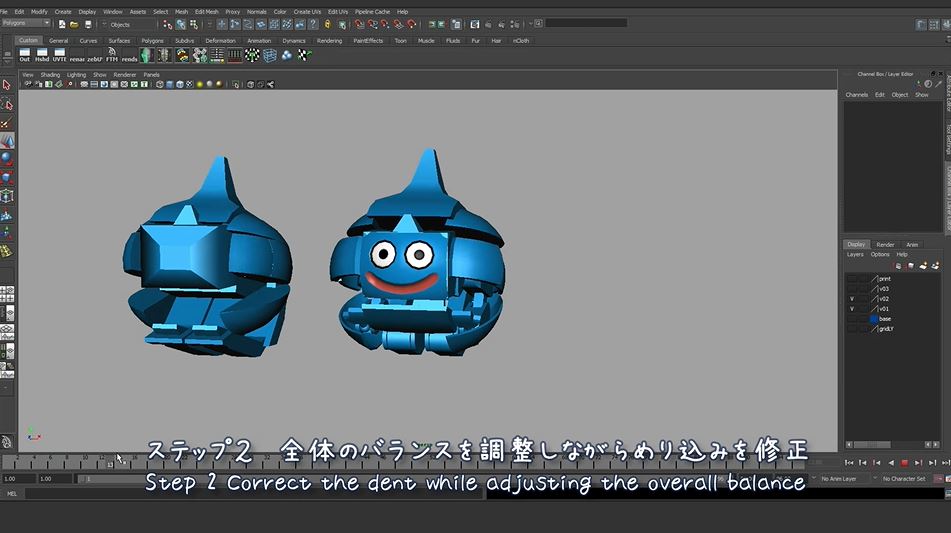
全体のバランスを調整しながら、スライムらしい形状にしていきます。
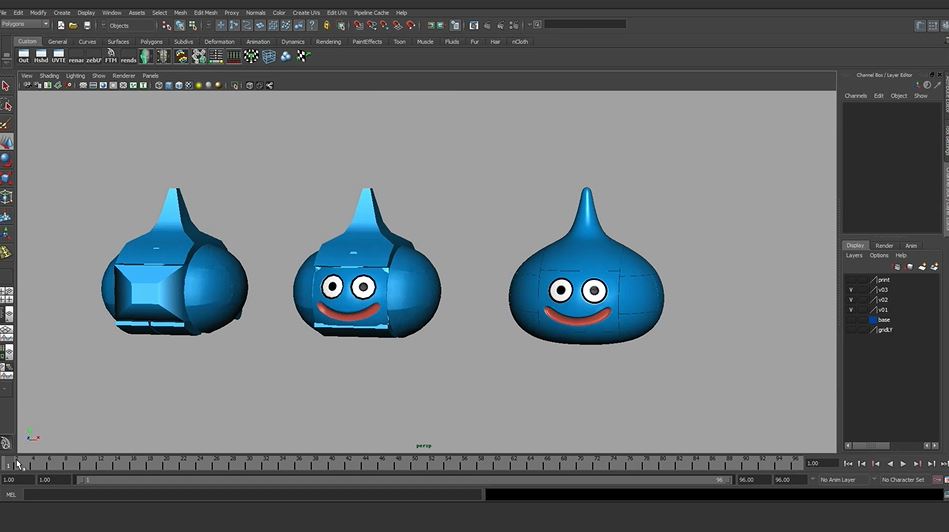

関節部分にビス用の穴を追加するなどの修正を加え、3Dモデルが出来ました。

水洗いレジンのクリアブルーで3Dプリント。
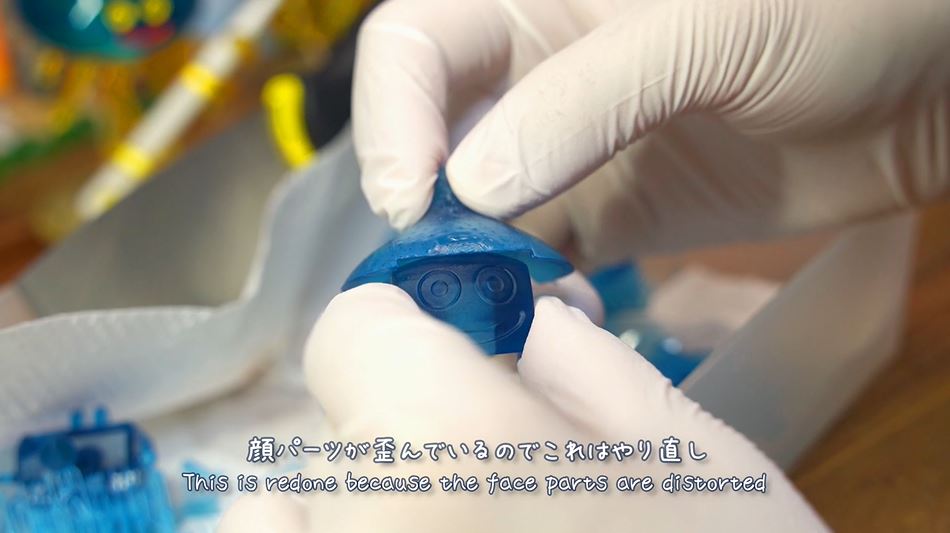


歪んでいたパーツは、サポートを追加したりパーツを分割するなどして再プリントしました。
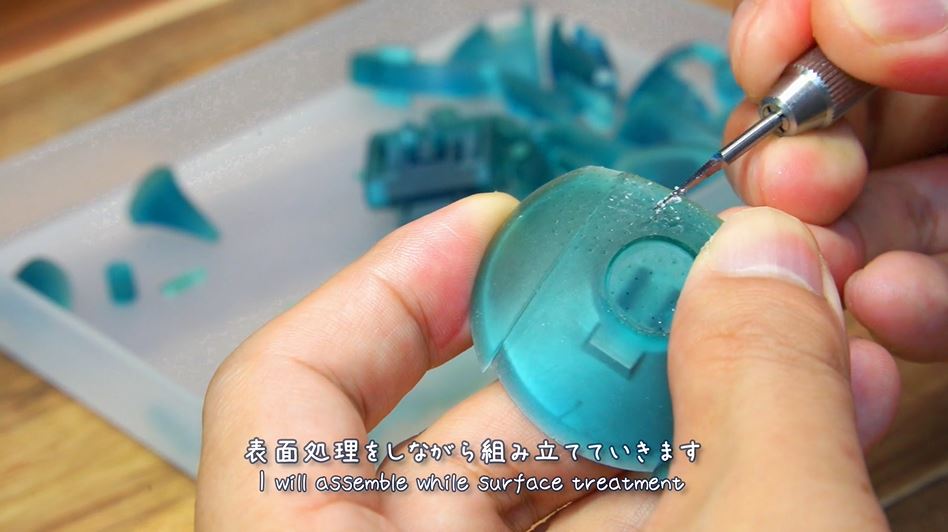


二次硬化したら表面処理をして組み立てます。

目と口を塗装して……

組み立て完了です。

いよいよトランスフォーム。まずは足を引き出します。

ここ、ちょっとスラッピー。

そして変形完了! 二足歩行のロボットへと変貌を遂げました。
モデリングだけで20時間かかったという可変式のスライム。完成作品や制作過程の詳細に興味を持たれた方は、ぜひ動画をご視聴ください。
視聴者のコメント
・おや、スライムのようすが・・・?
・すげえなこりゃ
・大変だぁ…
・案外小型だ、すごい
・かわいい
▼動画はこちらから視聴できます▼
―あわせて読みたい―
外部リンク

この記事に関連するニュース
-
紙だけでこんなにカッコよく……!? 折り紙で作る“王冠”が大人も心くすぐられる格好良さ 「なんて美しい」「これを作らなければ」
ねとらぼ / 2024年7月10日 20時45分
-
これはすごすぎ……! コーヒーメーカーを“ディズニーキャッスル”に魔改造 “20日間”の膨大な作業が100万再生「博物館に飾るべき」【海外】
ねとらぼ / 2024年6月28日 20時15分
-
マリオ、ドラクエ、ゼルダ…ゲームの“リメイク多すぎ”問題にファンから賛否。背景にあるメーカー&ユーザー「それぞれの事情」
集英社オンライン / 2024年6月27日 18時30分
-
柴犬の「図書カードNEXT」が3年ぶりに発売決定! "CMを作ろうプロジェクト"で柴犬の動画も募集中
マイナビニュース / 2024年6月27日 10時40分
-
装備すれば勇者気分が味わえる?ドラクエのファンアート作品「ロトのグラス」
おたくま経済新聞 / 2024年6月25日 18時0分
ランキング
-
1小1の子どもに「オシャレノート」を買い与えたら“まさかの号泣”…… 納得の理由が「そりゃあ仕方ない」と810万回表示
ねとらぼ / 2024年7月24日 7時45分
-
2これは尊い……! 5カ月の赤ちゃんがアンパンマンに変身 “冷蔵庫にあるもの”でできるナイスアイデアに「天才」「買いに行く!!」
ねとらぼ / 2024年7月24日 7時15分
-
3プロが本気で“アンパンマンの塗り絵”をしたら…… 衝撃の仕上がりが360万再生「凄すぎて笑うしかないww」「チーズが、、、」
ねとらぼ / 2024年7月18日 22時0分
-
4ヤマト運輸偽るフィッシング詐欺の報告が26倍に急増
マイナビニュース / 2024年7月23日 8時20分
-
5「ガンズ」スラッシュ義娘が急死 死後に更新されたインスタの内容が波紋「謝る必要なんてない」「こんな気持ちにならないでほしかった」
ねとらぼ / 2024年7月24日 16時51分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください






