

月面探査ローバー向け運転支援AIの試作に関するJAXAとの共同研究を開始
PR TIMES / 2024年6月5日 16時40分
地上不整地環境向けセンシング技術開発のノウハウを生かし、月面探査ローバー向け運転支援システムの試作を開始
パナソニック アドバンストテクノロジー株式会社は宇宙航空研究開発機構(JAXA)と「CG画像と少量データを用いた月面探査ローバー向け運転支援AIの試作」に関する共同研究を開始します。
本研究は、宇宙航空研究開発機構(JAXA)が推進する宇宙探査イノベーションハブ 「太陽系フロンティア開拓による人類の生存圏・活動領域拡大に向けたオープンイノベーションハブ」 にて実施(※1)した研究成果をもとに、ステレオカメラにより月面探査ローバーの安全な移動の妨げとなる岩石とクレータを障害物として検知する機能を向上させ、月面を環境認識する運転支援システムを試作開発します。
[画像1: https://prcdn.freetls.fastly.net/release_image/109020/8/109020-8-cc02be9b74b5737ba61c96f79d1263fe-1896x594.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
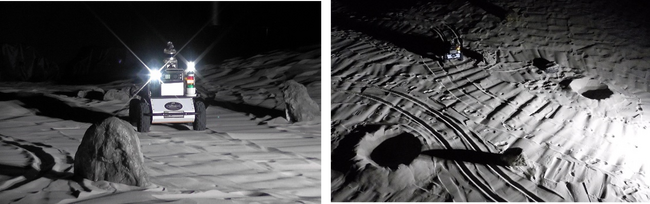
実証実験の様子 @JAXA宇宙探査実験棟
[画像2: https://prcdn.freetls.fastly.net/release_image/109020/8/109020-8-c15cf16f0f79f3322c7fb1566330ae58-1263x549.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
操作画面イメージ(開発中)
近年、様々なシーンで深層学習による物体検出モデルが活用されていますが、その開発には通常、大量の教師データが必要であり、多大な開発コストが課題となっています。また、災害現場などの危険なシーンへの適応や、宇宙環境のような容易にデータを収集できない場所への適応では、十分な量の教師データを用意する事ができず、AIが必要な性能を発揮しづらいという問題もあります。
従来から高品質なレンダリングによるCG画像を用いて深層学習する方法がありますが、CG画像と実データでは、少なからずギャップが存在するため、CG画像に対して精度の高い深層学習モデルを作成できたとしても、実際の運用環境では精度が低下するドメインシフト問題が発生します。
本研究では、シミュレータにより大量の月面環境を模したCG画像を生成しソースドメインとして構築し、それに対して少量の月面の実撮影データ(※2)をターゲットドメインとして、敵対的学習・半教師あり学習を実施しドメイン適応を行うことで、少量の教師データでも精度を低下させない物体検出深層学習手法を試行しています。
本研究開発により、低コストで精度の高いAIの開発が可能となり、地上でも教師データが入手困難であると言う理由で今まで普及が進んでいなかった事業領域にもAIシステムを適応できるようになる事が期待できます。
[画像3: https://prcdn.freetls.fastly.net/release_image/109020/8/109020-8-5ce3999ac433b522f3675f5b9890c92b-1888x638.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
月面を想定した環境認識技術の研究開発においては、月面を再現した仮想環境の構築が重要な要素となります。本研究開発では、NASAより公開されている月面南極域の3Dデータ(※3)をゲーム開発エンジンUnityに取り込み、そこからアルテミス計画の探査ローバーの走行タスク想定地点(※4)を切り出し、横から差し込む太陽光を模擬した3Dシミュレーション環境として構築しています。なお、公開地形データは5m/pixelと分解能が低く、月面探査ローバーの移動の妨げとなる10m以下の小さなクレータや岩石の情報が欠落してしまっているため、文献(※5)を参考に仮想のクレータや岩石を障害物として配置しています。
[画像4: https://prcdn.freetls.fastly.net/release_image/109020/8/109020-8-515c66b9c82186cbc0a16afcb8ee4a21-1300x460.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
当社にはこれまで車載商品開発において、センシング開発、モデルベース開発、シミュレーション開発のノウハウや実績があり、シミュレータ環境と実機・実環境の両方で評価可能な自動運転開発用共通PFを構築しています。
[画像5: https://prcdn.freetls.fastly.net/release_image/109020/8/109020-8-07a4d04492e05fc023c453babd60c5ec-881x364.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
システム構成図
JAXA宇宙探査実験棟の宇宙探査フィールドの模擬月面環境で小型ローバーを使用した走行試験による実証実験を行っています。南極域を想定し、横から差し込む太陽光を模擬した照明環境でロバスト性を評価し、性能改善を進めています。
[画像6: https://prcdn.freetls.fastly.net/release_image/109020/8/109020-8-31405de2fd80afe3ccfb2c50b4e07ca6-1949x758.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
実証実験の様子 @JAXA宇宙探査実験棟
当社はさまざまな自律移動モビリティを実現するための技術の確立に向け、今後もさらなる性能改善、ユースケースへの適応を続け、研究開発を推進してまいります。
【注釈】
(※1):「少量データ向けCG合成画像を用いた物体検出深層学習手法の試行」
https://www.ihub-tansa.jaxa.jp/topics/RFP_announcement8.html
取り組み紹介動画(Youtube):
https://www.youtube.com/watch?v=25eDuX1d6zY
インタビュー:
https://www.ihub-tansa.jaxa.jp/topics/interview_article_panasonic.html
(※2):月面探査ローバー公開画像データ(嫦娥3号、4号)
https://moon.bao.ac.cn/
(※3):South Pole Landing Site LOLA DEMs
https://pgda.gsfc.nasa.gov/data/LOLA_5mpp/
(※4):Traverse into crater/PSR:LUNAR SURFACE DATA BOOK Artemis Campaign Development ACD-50044 @NASA
(※5):SLS-SPEC-159: Cross-Program Design Specification for Natural Environments (DSNE) Revision I
[画像7: https://prcdn.freetls.fastly.net/release_image/109020/8/109020-8-a90d1d2b98c91ada2e9ef22d43ab0e77-278x278.png?width=536&quality=85%2C75&format=jpeg&auto=webp&fit=bounds&bg-color=fff ]
ミッションロゴ:Panasonic Advanced technology Development challenges the moon.
【問い合わせ先】
パナソニック アドバンストテクノロジー株式会社
https://adtsd.jpn.panasonic.com/contact/
contact.pad@ml.jp.panasonic.com
パナソニック アドバンストテクノロジーについて
パナソニック アドバンストテクノロジー株式会社は、パナソニック ホールディングス株式会社の関連会社で、ソフトウェア/システム開発を主業務とする会社です。
2011年に発行された自動車機能安全規格ISO26262において、2012年にASIL D(Automotive Safety Integrity Level:自動車安全水準の最高ランクD)を認定取得しています。機能安全対応の車載ECU開発(自動駐車ECU/トランスミッション制御ECUなど)をはじめ、建設機械の自動運転、モノ搬送ロボットなどのモビリティ開発を多数手がけております。
また、モビリティ以外に住宅、ロボティクス、セキュリティ分野などでの技術開発、事業展開にも取り組んでいます。
https://adtsd.jpn.panasonic.com/
企業プレスリリース詳細へ
PR TIMESトップへ

この記事に関連するニュース
-
「UTO Well-Being 探究Award 2024」を開催 7月23日(火)9:40~16:10 @熊本城ホール
PR TIMES / 2024年7月12日 18時45分
-
JAXA理事として「きぼう」「こうのとり」を成功に導いた長谷川義幸氏が、スペースデータのアドバイザーに就任
PR TIMES / 2024年7月12日 12時45分
-
【桐蔭横浜大学】第26回 桐蔭おもしろ体験教室を8/2(金)に開催
PR TIMES / 2024年7月10日 12時15分
-
三菱重工で国際宇宙ステーションの開発をリードした竹内芳樹氏が、スペースデータのアドバイザーに就任
PR TIMES / 2024年7月1日 12時15分
-
◆30カ国以上から参加◆国際宇宙ビジネスカンファレンス『SPACETIDE2024』全登壇者情報を公開
PR TIMES / 2024年6月26日 12時15分
ランキング
-
1イタリア人が営む「老舗ラーメン店」の人生ドラマ 西武柳沢「一八亭」ジャンニさんと愛妻のこれまで
東洋経済オンライン / 2024年7月22日 11時30分
-
2なぜユニクロは「着なくなった服」を集めるのか…「服屋として何ができるのか」柳井正氏がたどり着いた答え
プレジデントオンライン / 2024年7月22日 9時15分
-
3円安は終わり?円高反転4つの理由。どうなる日経平均?
トウシル / 2024年7月22日 8時0分
-
4ウィンドウズ障害、影響続き世界全体で2600便欠航…損害は1600億円を超えるとの見方も
読売新聞 / 2024年7月22日 11時16分
-
5「土用の丑の日」物価高でも…あの手この手の“うなぎ商戦” 大手スーパーの目玉は「超特大」
TBS NEWS DIG Powered by JNN / 2024年7月22日 19時59分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください






