

ロボティクスの導入ハードルを下げる パナソニックHD、ロボットへの動作教示を効率化する技術を開発
PR TIMES / 2023年8月8日 16時15分
[画像: https://prtimes.jp/i/3442/5279/resize/d3442-5279-35dfd098f43d32248ea5-0.jpg ]
パナソニック ホールディングス株式会社は、ロボット制御において、環境(ドアやテーブルなど)との接触を含む動作をロボットに教示する際に、教示した動作を正しく完遂する「パフォーマンス」と、接触時の「安全性」を両立する制御パラメータを効率的に学習する技術を新たに開発しました。
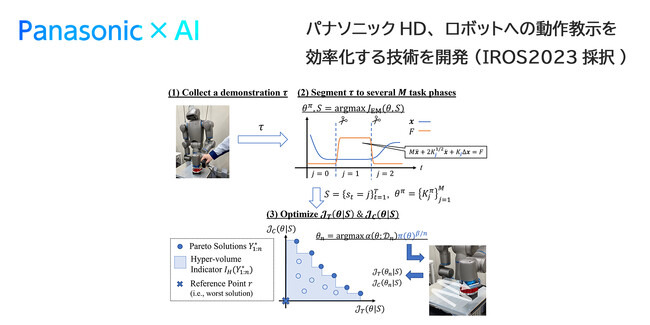
産業用ロボットの活用が進む中、タスク達成(※1)のためロボットに動作を効率的にプログラムする技術がますます重要になっています。ロボットの動作をプログラムする手法として、人がダイレクトにロボットの動きを教示するダイレクトティーチングという手法が、その簡便さから広く採用されています。しかしながら、教示した動作をロボットで再生する場合、モノとの接触がある環境や、人や他のロボットとの協働・分業する環境下では不測の接触リスク(※2)に対応する必要があります。つまりタスクを正確にこなしながら、接触リスクを低減する動作が求められますが、その二つを両立するロボット制御は非常に難易度が高いことが知られています。そこでバネのように柔軟な挙動をするロボットを想定し、人がロボットに教示した動作の分節化と、多目的ベイズ最適化で制御パラメータを求める二段階の手法を考案し、従来法に比べて効率的にロボットをプログラムする手法を開発しました。
本技術の先進性が国際的に認められ、AI/ロボティクス技術のトップカンファレンスであるIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023に採択されました。(採択率43%)
2023年10月1日から2023年10月5日まで米国デトロイトにて開催される本会議で発表します。
※1:タスクの多くは連続する複数の動作を正確にこなさなければ完遂できません(例えばドア開けタスクの場合、(1)ドアハンドルに近づくアプローチ、(2)ドアハンドルを握って回す、(3)ドアハンドルを引いてドアを開ける)。
※2:例えばドア開けタスクの場合、ロボットアームの位置制御において、制御誤差による初期位置ズレによりハンドルを過剰に回転させる、またドアに対してロボットの向きがずれてしまいハンドルを異なる方向に引いてしまうなどでドアに損傷を与えるリスクがあります。
全文は以下プレスリリースをご覧ください。
▼[プレスリリース]ロボティクスの導入ハードルを下げる パナソニックHD、ロボットへの動作教示を効率化する技術を開発(2023年8月8日)
https://news.panasonic.com/jp/press/jn230808-1
<関連情報>
・Learning Compliant Stiffness by Impedance Control-Aware Task Segmentation and Multi-Objective Bayesian Optimization with Priors
https://arxiv.org/abs/2307.15345
・IROS 2023 公式サイト
https://ieee-iros.org/
・Panasonic×AI WEBサイト
https://tech-ai.panasonic.com/jp/
・Panasonic×AI 公式SNS
https://twitter.com/panasonic_ai
・Robotics Hub WEBサイト
https://tech.panasonic.com/jp/robot/
企業プレスリリース詳細へ
PR TIMESトップへ

この記事に関連するニュース
-
パナソニックHD、未知データを1/4の計算コストで効率的に見分けられるAI技術「Split-Ensemble」を開発
PR TIMES / 2024年7月17日 18時45分
-
画像認識世界最高峰の学会、CVPR2024のコンペ「Ego4D EgoSchema Challenge」でパナソニック コネクトが世界で第2位の評価を獲得
PR TIMES / 2024年7月16日 15時45分
-
パナソニックHD、Flowベース生成モデルにおいて、従来難しかったタスク特有の知識を扱えるAI技術を開発
PR TIMES / 2024年7月12日 17時40分
-
パナソニック コネクト 生成AI導入1年の実績と今後の活用構想
PR TIMES / 2024年6月25日 14時15分
-
「TECHNO-FRONTIER 2024 ~技術の「シン」化で未来を作る~」パナソニック インダストリーブースの展示概要と見どころ
PR TIMES / 2024年6月20日 13時15分
ランキング
-
1マクドナルドが「ストローなしで飲めるフタ」試行 紙ストローの行方は...?広報「未定でございます」
J-CASTニュース / 2024年7月17日 12時55分
-
2セルフレジで客が減る? 欧米で「セルフレジ撤去」の動き、日本はどう捉えるべきか
ITmedia ビジネスオンライン / 2024年7月18日 8時10分
-
3「レイバン」メーカー、人気ブランド「シュプリーム」を15億ドルで買収
ロイター / 2024年7月18日 8時34分
-
4永谷園、MBO成立=今秋にも上場廃止
時事通信 / 2024年7月17日 20時36分
-
5申請を忘れると年金200万円の損…荻原博子「もらえるものはとことんもらう」ための賢者の知恵
プレジデントオンライン / 2024年7月17日 8時15分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください






