

ジョージア工科大の「BOBbot」は“確率論的”に協調。群れで大きなタスクを成し遂げる
Techable / 2021年5月7日 15時1分
ロボットの群れを完璧に制御するとなると、高度なプログラミングやセンサー、通信が必要になります。ジョージア工科大学(ジョージアテック)の研究者らは、こうした複雑な解決手段を除外して、ロボットを協調させようと試みています。
粒状体の物理学のパイオニア、Bob Behringerにちなんで名づけられた「BOBbot」は、シンプルな造りにも関わらず、ロボット単体では成し得なかったタスクを集団で達成できることが示されました。
センサーや計算なしでの集団行動を実現研究者らの目的は「非常にシンプルなロボットで、どんな複雑なタスクを実行できるかを見ること」にありました。
ジョージアテックでは、以前にも「Smarticles」と呼ばれるマイクロボット群で、鳥の群れや細菌のコロニーなんかに見られる集団運動のランダム性を再現しています。
Smarticlesが、Arduino Pro Miniや光/音センサーなどで構成されていたのに対し、BOBbotでは、センサー、通信、メモリ、計算を取り除くことができました。
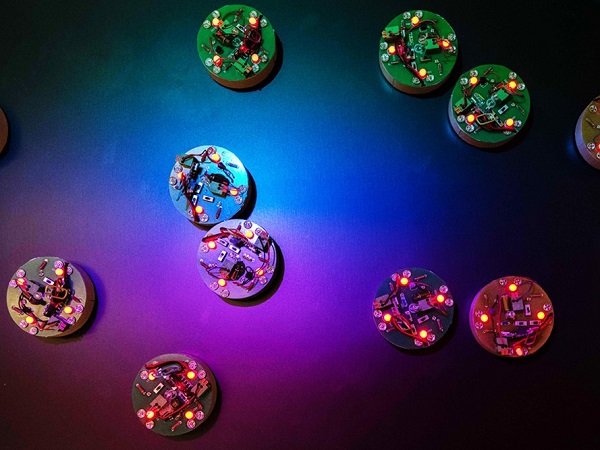
磁気の相互作用を利用BOBbotでは、円筒形のシャーシにモーターと振動ブラシを備え、ロボット内部のスペースにはマグネットビーズが置かれています。このマグネットビーズによる磁気の相互作用を利用して機能。近隣のロボットと近づきやすくなります。
研究では、磁気相互作用が増加するにつれて、分散していた個体が大規模な集合体へと急激に変化することが証明されました。
ロボットが動き回って互いにぶつかるうちに、単体では移動できないほど重たいモノを運べるようになったようです。
なお、ロボットが集合体を形成してモノを運ぶ様子は動画で確認できます。
参照元:Simple Robots, Smart Algorithms: Meet the BOBbots/ Georgia Tech News Center
(文・山田洋路)
外部リンク

この記事に関連するニュース
-
ABEJA、ABEJA Platformにロボティクス・AIを実装 ~ ABEJA Platformにフィジカルなロボットへの連携技術を追加 ~
PR TIMES / 2024年11月22日 19時45分
-
犬型ロボット「スポット」、ユズ収穫に大活躍 課題は複数の協調
毎日新聞 / 2024年11月20日 16時36分
-
中国独自開発の「ロボットウルフ」部隊が初の動態展示
Record China / 2024年11月13日 15時30分
-
「ロボット大賞 優秀賞」受賞記念セミナーを開催 近接覚センサーTK-01の生みの親・小山佳祐が開発の裏側と“実現したい未来”を語る
PR TIMES / 2024年11月6日 11時45分
-
Geek+、インテルと共同でビジョン専用ロボットソリューションを初公開、奥行き知覚によるスマートロジスティクスの革新を目指す
共同通信PRワイヤー / 2024年11月6日 9時47分
ランキング
-
1“熱狂”のファミコン版『ドラクエ3』発売日を、当時の新聞各社はどう報じた?後世まで語り継ぐべき名記事も発掘
インサイド / 2024年11月24日 17時0分
-
2クルマを停めた位置、実はウォッチで分ります。 「コンパス」アプリの便利ワザ3選|Apple Watch Hacks
&GP / 2024年11月24日 19時0分
-
3【格安スマホまとめ】povo2.0、ローソンに行くと月1GB貰える! コラボが本格スタート
ASCII.jp / 2024年11月24日 15時0分
-
4Minisforumが「ブラックフライデー」を開催! 新商品も最大41%お得に買える
ITmedia PC USER / 2024年11月24日 0時0分
-
5Twitter Japanが社名変更、「X Corp. Japan」に
ITmedia NEWS / 2024年11月24日 15時8分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください





