

【東芝】物流現場において、複数の吸着パッドを持つロボットハンドが正確かつ高速に対象物を掴む位置や掴み方を計算するAIを開発
Digital PR Platform / 2024年10月17日 10時0分
2024-10-17
株式会社 東芝
物流現場において、複数の吸着パッドを持つロボットハンドが
正確かつ高速に対象物を掴む位置や掴み方を計算するAIを開発
~乱雑に置かれた多様な物品を94.5%の確率でピッキングに成功。物流倉庫の自動化に貢献~
概要
当社は、深層学習を用い、複数の吸着パッドを持つロボットハンドがピッキングする対象物の形状や姿勢に合わせて掴む位置と掴み方(把持計画)を正確かつ高速に計算するAI技術を開発しました。「把持計画」は、ロボットが物体を正確に掴むための「位置推定」と「姿勢推定」から計算されます。ピッキングロボットは、正確な把持計画を計算することで効率的かつ確実に物体を取り扱うことができ、従来自動化が難しかった、乱雑に置かれた、形状や外観の異なる物品のピッキング作業を自動化することができます。
当社は本AIの有効性を計算機で検証したところ、同様の条件の他の研究(*1)と比較し、計算時間が10分の1以下の0.47秒、成功率は6.2%向上し80.1%を実現したことを確認し、世界最高の平均計算速度と平均成功率を達成しました(*2)。また、本AIを実機のピッキングロボットに適用しピッキング作業を行ったところ、94.5%の確率で乱雑に置かれた形状や外観の異なる物品のピッキングに成功し、実用化レベルであることを確認しました。
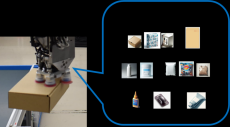
これにより、封筒や書類などの平面の物品から、各種サイズの箱や円筒容器、チューブ容器やブリスターパックなどの高さや奥行、凹凸のある物品など、形状や外観の異なる多種多様な物品をロボットハンドで高速かつ正確に自動でピッキングすることができるようになります。また、学習にあたっては技術者によるプログラミングが不要で、ロボット導入後に対象物の種類が増えた場合でも追加学習が容易となり、ロボット全体のコスト低減につながります。
当社は、本技術の詳細を、10月14日から18日にかけてアブダビ首長国で開催されるロボティクス分野で世界トップクラスの国際学会「IROS(IEEE/RSJ International Conference on Intelligent Robots and Systems)2024」にて発表します。
開発の背景
近年、EC(電子商取引)市場は拡大の一途をたどる一方、国内では人口減少に伴う労働力不足が深刻化しており、物品の搬送など物流倉庫内の様々な作業で自動化が求められています。しかし、顧客からの注文に従って物流倉庫内の保管箱から物品を取り出す「ピッキング作業」は、大規模な物流倉庫では数千から数万種の物品を扱っており、それぞれ異なった形状や外観にロボットが対応することは困難です。現在実用化されているピッキングロボットの多くは、対象物が同じ形状や平面の物品に限定されているとともに、各対象物品に対して、技術者が知見に基づき、位置や向き・姿勢を検出する「認識」や、把持する位置を計算する「動作計画」などのプログラムを組んで設計・開発しています。物品の特徴ごとにプログラムを用意するコストがかかるため、技術者によるプログラミングが不要で、多種多様な物品を取り出せるロボット技術が期待されています。
こうした背景から、従来技術者が知見に基づきプログラムしていた対象物の認識や動作計画に、「深層学習」を活用する研究開発が進められています。ロボットによるピッキング手法は、吸着パッドを使って対象物を吸着する「吸着ハンド」や、人間の手に似た複数の指を持つグリッパーで対象物を挟み込む「挟持ハンド」などがありますが、柔軟性・操作性・動作速度や、デリケートな物品の取り扱いの観点で、多くの場合「吸着ハンド」が用いられます。多種多様な対象物を扱うには複数の吸着パッドを有するハンドを使用するのが効果的ですが、複数の吸着パッドのハンドは動作の計算に時間がかかったり、接触する箇所を間違えると、搬送中に対象物を落下させてしまったり、誤って2個取ってしまうなど、精度も不十分という課題がありました。

この記事に関連するニュース
-
FingerVisionの触覚ロボット、CES Innovation Awards(R)を受賞
PR TIMES / 2024年11月16日 17時40分
-
ラピュタロボティクス が、NVIDIA アクセラレーテッド コンピューティングにより、自在型自動倉庫「ラピュタ ASRS」を高速化
PR TIMES / 2024年11月13日 17時15分
-
【東芝デジタルソリューションズ】「SATLYS 映像解析AI」の人物/物体検出・追跡など4種のAIモデルがNVIDIA Jetsonに対応
Digital PR Platform / 2024年11月11日 15時1分
-
「ロボット大賞 優秀賞」受賞記念セミナーを開催 近接覚センサーTK-01の生みの親・小山佳祐が開発の裏側と“実現したい未来”を語る
PR TIMES / 2024年11月6日 11時45分
-
Geek+、インテルと共同でビジョン専用ロボットソリューションを初公開、奥行き知覚によるスマートロジスティクスの革新を目指す
共同通信PRワイヤー / 2024年11月6日 9時47分
ランキング
-
1ドンキの新作弁当 ご飯に盛り付けた“まさか”の具材とは? 開発担当者が「あえて“本物”よりおいしくしなかった」と語る背景
ITmedia ビジネスオンライン / 2024年11月27日 16時14分
-
2エンジン不正の日野自動車、工場敷地の5割売却へ…財務基盤の立て直し図る
読売新聞 / 2024年11月27日 15時31分
-
3アイリスオーヤマ、子ども用おむつ事業参入…王子ネピアと「Genki!」ブランド契約
読売新聞 / 2024年11月27日 19時49分
-
4何副首相、邦人安全「必ず守る」 関西財界、万博で中国と連携確認
共同通信 / 2024年11月27日 19時13分
-
5富裕層が日本株を「今、面白い」と注目している訳 個人投資家は中小型株投資ではプロよりも有利
東洋経済オンライン / 2024年11月27日 8時30分
複数ページをまたぐ記事です
記事の最終ページでミッション達成してください





