

JAIST、柔軟なソフトロボットのための触覚センシングシステムを開発
マイナビニュース / 2024年8月7日 15時1分
画像提供:マイナビニュース
北陸先端科学技術大学院大学(JAIST)は8月6日、象の鼻やタコの足などの器用さを持つ生物の自然構造を模倣した柔軟さを有する「連続体ロボット」(ソフトロボット)のための新たな触覚センシングプラットフォームを開発したことを発表した。
同成果は、JAIST ナノマテリアル・デバイス研究領域のHo Anh Van准教授、同・Nguyen Tai Tuan大学院生、同・Luu Khanh Quan大学院生らの共同研究チームによるもの。詳細は、7月15~19日にオランダ・デルフトで開催されたロボティクス研究会におけるトップカンファレンス「Robotics: Science and Systems」にて発表された。
研究チームが開発を進めているソフトロボットは、象の鼻やタコの足などの自然構造の原理を応用することで、高い堅牢性や安全性を備えたロボットだ。ソフトロボットは、大半のタスクで必要となる自由度よりも多くの自由度を持ち、剛体ロボットとは異なる柔軟性や器用さにより、不測の事態への対応を可能とする。特に、障害物や外乱などがある環境下で真価を発揮するという。
しかし、ソフトロボットのように柔軟性の高いロボットは、動作中に複雑な屈曲やカーブを描くため、形状や動きを正確に把握することが課題となっている。解析によってそれらのロボットの運動学・動力学的問題を解決することは可能ではあるものの、複雑なモデリングが必要となってしまうとする。
そこで解析とは異なるアプローチとして考えられたのが、ソフトロボットに組み込まれた柔軟性を持つセンサを用いる手法だ。この手法では、ロボットの表面に取り付けたり覆ったりすることが可能だが、多くの低解像度センサを必要とし、システムが大型になってしまうという欠点も抱えていた。
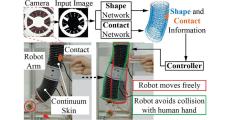
その欠点を解決するための手段として、ロボットやアクチュエータの端に1つのセンサモジュールを使用し、大型化を避けて効率化を図るという手段が考えられている。しかしこれまでの研究では、ロボットの姿勢推定に重点が置かれており、ロボットの柔軟性に対応するための接触検出は含まれていなかったという。そこで研究チームは今回、柔らかいスキンを持つロボットアームの形状を推定し、接触を検出できるシステムの開発を試みたとする。
今回の研究では、ロボットアームの位置推定と触覚検出を行うことが可能な、ビジョンベースの触覚センシングシステム「ConTac」が開発された。同システムの最終的な目標は、ソフトロボットに実装することだというが、今回の研究では検証のため柔らかいスキンを持つ多関節ロボットアームを用いて“知覚”に焦点を当て、開発が行われた。
-

-
- 1
- 2
-


この記事に関連するニュース
-
シャインマスカット栽培にAI活用、スマート農業で「匠の技」実現できるか 山梨大など
産経ニュース / 2024年8月1日 10時0分
-
SF映画や科学研究論文から「飛び出した」特殊ロボット―中国
Record China / 2024年7月29日 7時30分
-
産総研、土壌中の有害な水銀を現場で高感度に検出できる手法を開発
マイナビニュース / 2024年7月16日 18時18分
-
【芝浦工業大学】光ファイバーセンサーにおける空間分解能の推定法を確立 -- 老朽化・被災したインフラ施設の健全性診断に貢献 --
Digital PR Platform / 2024年7月10日 14時5分
-
芝浦工業大学の研究チームが光ファイバーセンサーにおける空間分解能の推定法を確立
@Press / 2024年7月10日 11時0分
ランキング
-
1日本における生成AIやRAGの成功の鍵とは? - Gartnerがハイプ・サイクルを発表
マイナビニュース / 2024年8月7日 14時11分
-
2これが13万2000円!? ヤフオクに出品された「ポケモン仕様の激レアゲーム機」に思わず二度見
ねとらぼ / 2024年8月7日 7時15分
-
3グーグル「Chrome」に深刻な脆弱性 早めに更新を
ASCII.jp / 2024年8月7日 12時30分
-
4「おまえは偉くない」 フワちゃんの“不適切投稿”で“HIKAKINの炎上回避法”に再注目 「本当に参考になる」「教科書に載せてほしいレベル」
ねとらぼ / 2024年8月7日 12時27分
-
5iPadが勝手にテザリングを始めてしまいます!? - いまさら聞けないiPhoneのなぜ
マイナビニュース / 2024年8月7日 11時15分
複数ページをまたぐ記事です
記事の最終ページでミッション達成してください






