実世界の困難作業自動化を目指したロボット基盤モデルの研究開発を本格始動
共同通信PRワイヤー / 2025年1月23日 14時0分
産総研のロボット・データ・計算資源を活用し産業界との新たな橋渡しを目指す
【画像:https://kyodonewsprwire.jp/img/202501213153-O1-nPCSBUmh】
概 要
国立研究開発法人 産業技術総合研究所(以下「産総研」という)は、製造・物流・小売などの産業分野や家庭・オフィスなどのサービス分野でAI・ロボティクス技術により自動化を促進するロボット基盤モデルの研究開発を開始します。ロボット基盤モデルの共創的な社会・産業実装を実現するために、作業自動化に課題を抱えるロボットユーザー、ロボットメーカー、ロボットシステムインテグレーターとの連携を目指します。
研究開発の背景
近年、ロボティクス技術とAI技術の融合によりロボットの汎用性・即応性・柔軟性を格段に向上させる研究が世界的に活発に行われています。少子高齢化による労働人口減少に対応するために社会・産業現場の自動化ニーズは高まっており、実世界における作業自動化のキーデバイスであるロボットはこれまでにも多くの現場に導入されてきました。しかし、柔らかくて変形する物体や透明な物体を扱う作業、多種多様な物体を扱う作業などは、従来のティーチングやプログラミングに基づく運用ではロボットへの作業教示が困難であるという課題がありました。このような課題に対して大量の実世界データから学習されたロボット基盤モデルを開発し、これまで自動化が困難であった複雑な実世界の作業にロボットを導入しようという気運が高まっています。
研究開発の経緯
産総研ではこれまでに、実世界の多種多様な作業に対して汎用的に適用可能なロボット基盤モデルを構築するためのコア技術となる、視覚と力覚の関係を想起するAIモデル、人間の認知発達過程を模した動作基盤学習、実画像データの収集が不要な数式に基づく学習データ生成などの研究成果を公表してきました[1]。
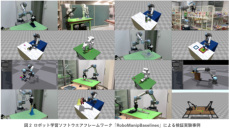
【画像:https://kyodonewsprwire.jp/img/202501213153-O2-3bi998W4】
ロボット基盤モデルを構築するための設備の導入・運用も進めており、これまでにAI橋渡しクラウド(ABCI)をはじめとする計算資源やデータ収集に必要となるロボット実験環境を整備してきました[注意事項]。さらに、最先端の模倣学習手法を実世界やシミュレーションのさまざまな環境で再現検証するためのソフトウエアフレームワーク「RoboManipBaselines」を開発し公開しています[2]。これらの設備やソフトウエアを利用し臨海副都心センターに設置した工場やコンビニエンスストアを模した実験環境において、双腕マニピュレータプラットフォームALOHAや産業用ロボットにより、ロボット基盤モデルの構築に欠かせない実世界の作業データを収集しデータセットの構築を進めています。

この記事に関連するニュース
-
NVIDIA が業界のリーダーと提携し、ゲノミクス、創薬、ヘルスケアを推進
PR TIMES / 2025年1月17日 18時15分
-
炭素繊維強化プラスチック(CFRP; Carbon Fiber Reinforced Plastics)製品の資源循環をISO国際規格で後押し
共同通信PRワイヤー / 2025年1月16日 14時0分
-
量子コンピューターの大規模化を支える材料評価技術
共同通信PRワイヤー / 2025年1月16日 0時0分
-
千葉工業大学、NEDO委託事業「実世界に埋め込まれる人間中心の人工知能技術の 研究開発」プロジェクト最終成果報告会に参加
Digital PR Platform / 2025年1月10日 20時5分
-
NVIDIA、フィジカル AI 開発を加速する Cosmos 世界基盤モデル プラットフォームを発表
PR TIMES / 2025年1月7日 14時45分
ランキング
-
1フジ・日枝相談役について取締役の1人「退任を求めるのは難しい」 中居氏と女性をめぐる一連の対応のなかで進退注目
TBS NEWS DIG Powered by JNN / 2025年1月31日 13時35分
-
2令和の米騒動で外食の「お代わり無料」が危機に? 対応分かれる各社の現状
ITmedia ビジネスオンライン / 2025年1月31日 10時48分
-
3地方の鉄道会社が執念で成功「誠実ビジホ」の実態 ものづくりの境地?静鉄ホテルプレジオの凄み
東洋経済オンライン / 2025年1月31日 8時40分
-
4「まどか26歳」9時5時勤務の研修医が見た"葛藤" 「労働時間が短い=良い」は思い込みなのか
東洋経済オンライン / 2025年1月31日 8時50分
-
5フジ「CMストップ大打撃」、親会社の利益ほぼ半減 「中居問題」で広告収入が200億円超も吹き飛ぶ
東洋経済オンライン / 2025年1月31日 7時30分
複数ページをまたぐ記事です
記事の最終ページでミッション達成してください