

BIM/CIMに双方向で連動し現場環境をBIM/CIM上に更新できる「BIM/CIM双方向連動自動巡回ロボットシステム(i-Con Walker)」を開発
PR TIMES / 2021年4月26日 19時15分
株式会社イクシス(本社:神奈川県川崎市、代表取締役Co-CEO:山崎文敬、狩野高志)は、インフラ関連業界、特に建設業界におけるBIM/CIMを活用した生産性向上の一環として、BIM/CIM上で自動巡回ロボットの行動計画を設計し、かつ自動巡回ロボット[A1] が現場環境から取得した情報をBIM/CIMに反映する「BIM/CIM双方向連動自動巡回ロボットシステム(i-Con Walker)(以下「i-Con Walker」という。)」を開発しました。
本技術により、建設各フェーズでの現場の出来高、出来形、点検結果をリアルタイムにBIM/CIM上に反映し各種情報を属性情報に登録・更新することができます。さらに更新されたBIM/CIM上で自動巡回ロボットの行動計画を設計することができ、日々変化する現場環境下においても安定した出来高・維持管理が行えます。
[動画: https://www.youtube.com/watch?v=W9KKEEta6Qo ]
昨今、国土交通省が「ICTの全面的な活用(ICT土工)」等の施策を建設現場に導入することにより、建設生産システム全体の生産性向上を図るi-Construction(アイ・コンストラクション)を推進しており、建設6フェーズ(測量、設計、施工、検査、維持管理、廃棄更新)を3次元モデルに連携・発展させ事業全体での情報共有を図る「BIM/CIM」(BIM:Building Information Modeling、CIM:Construction Information Modeling)が活用されてきています。
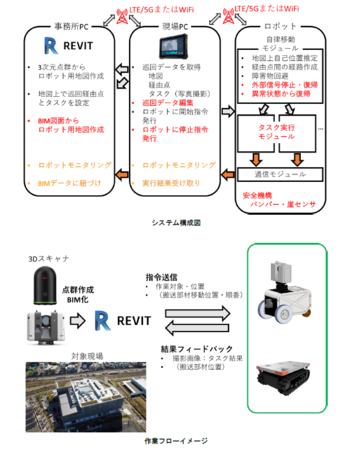
「i-Con Walker」は、最新の現況に更新されたBIM/CIMデータ上でロボットが動作する行動計画を、部材に紐づけた中継点を連続的に指定することで設計し、自動巡回ロボットは中継点間をSLAM(Simultaneous Localization and Mapping)技術等を用いて障害物回避をしながら移動し、中継点で指定されたタスク(写真撮影、物資移送、施工、3D出来形計測等)を実施します。
その結果は部材の属性データIFC(Industry Foundation Classes)に反映されます。
これを繰り返すことで一連のタスクを遂行するとともに、BIM/CIMデータを最新情報としてリアルタイムに更新することができ、遠隔地のBIM/CIMのCADソフト上で、それらの状況をリアルタイムに観察することができます。
「i-Con Walker」により設計段階で作成したBIM/CIMデータを、日々の更新により、最終的に出来形BIM/CIMを作成することができ、業務の高度化、生産性の向上に寄与できます。
イクシスは「ロボット×テクノロジーで社会を守る」をミッションとし、ロボットを利用したデータ取得・AI解析・3次元データ連携など、インフラ関連業界におけるDXを支援、そして社会課題の解決への貢献を目指しています。
■株式会社イクシスの概要
設 立 :1998年6月
本 社 :神奈川県川崎市幸区新川崎7-7 AIRBIC内
拠 点 :東北(仙台)、甲信越(長野)、関西(大阪)、九州(福岡)、横浜RTF
代表者 :山崎文敬、狩野高志
ミッション:「ロボット×テクノロジーで社会を守る」
ビジョン :インフラの抱える社会的課題の解決に貢献する
事業内容 :社会・産業インフラ向けロボット及び特殊環境対応型ロボット等の開発・販売
取得データのAI解析サービス、3D-Data Solutionサービス
HP URL :https://www.ixs.co.jp/
以上
企業プレスリリース詳細へ
PR TIMESトップへ

この記事に関連するニュース
-
FLIGHTS、国土交通省 北海道開発局のICT・BIM/CIMアドバイザーに登録決定~北海道全地域に向けた3D測量の支援の強化へ~
PR TIMES / 2024年4月9日 10時45分
-
DataLabs 、「Deloitte Tohmatsu Innovation Summit 2024」でベンチャー最優秀賞を受賞。官公庁との連携など評価
PR TIMES / 2024年4月6日 11時40分
-
鹿島建設、カジマメカトロエンジニアリングと共同で風量測定ロボット「Air-vo(TM)」を開発
PR TIMES / 2024年4月4日 15時15分
-
風量測定業務を約6割削減する「Air-vo(TM)」(エアボ)を開発
PR TIMES / 2024年4月4日 13時15分
-
3キャリア搭載の5G通信サービス「GENBA-Net 5G」をリリース
PR TIMES / 2024年3月30日 12時40分
ランキング
-
1米ファンドに日本KFC売却=三菱商事、来月にも
時事通信 / 2024年4月26日 20時17分
-
2円安、物価上昇通じて賃金に波及するリスクに警戒感=植田日銀総裁
ロイター / 2024年4月26日 18時5分
-
3突然現場に現れて「良案」を言い出す上司の弊害 「気になったら即座に直したい」欲求への抗い方
東洋経済オンライン / 2024年4月26日 9時0分
-
4「加賀屋」50歳の元若女将が選んだ"第2の人生" 震災からの復興への道、仕事術について聞く
東洋経済オンライン / 2024年4月26日 13時0分
-
5なぜ歯磨き粉はミント味? ヒット商品の誕生には「無駄」が必要なワケ
ITmedia ビジネスオンライン / 2024年4月26日 8時0分
記事ミッション中・・・
記事にリアクションする
![]()
記事ミッション中・・・
記事にリアクションする

エラーが発生しました
ページを再読み込みして
ください





